ss2ss
State coordinate transformation for state-space model
Syntax
Description
ss2ss performs the similarity transformation z = Tx on the state vector x of a state-space model. For more
information, see Algorithms.
Examples
Perform a similarity transform for a state space model.
Generate a random state-space model and a transformation matrix.
rng(0) sys = rss(5); t = randn(5);
Perform the transformation and plot the frequency response of both models.
tsys = ss2ss(sys,t); bode(sys,'b',tsys,'r--') legend
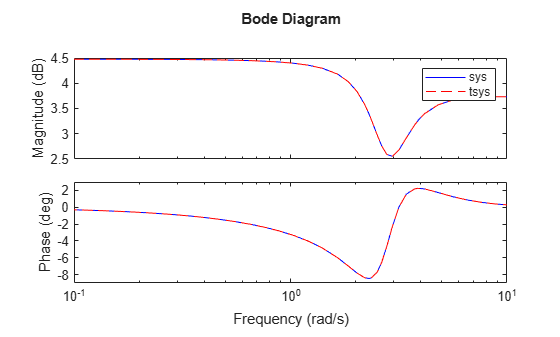
The responses of both models match closely.
ss2ss applies state transformation only to the state vectors of the numeric portion of the generalized model.
Create a genss model.
sys = rss(2,2,2) * tunableSS('a',2,2,3) + tunableGain('b',2,3)
Generalized continuous-time state-space model with 2 outputs, 3 inputs, 4 states, and the following blocks: a: Tunable 2x3 state-space model, 2 states, 1 occurrences. b: Tunable 2x3 gain, 1 occurrences. Model Properties Type "ss(sys)" to see the current value and "sys.Blocks" to interact with the blocks.
Specify a transformation matrix and obtain the transformation.
T = [1 -2;3 5]; tsys = ss2ss(sys,T)
Generalized continuous-time state-space model with 2 outputs, 3 inputs, 4 states, and the following blocks: a: Tunable 2x3 state-space model, 2 states, 1 occurrences. b: Tunable 2x3 gain, 1 occurrences. Model Properties Type "ss(tsys)" to see the current value and "tsys.Blocks" to interact with the blocks.
Decompose both models.
[H,B,~,~] = getLFTModel(sys); [H1,B1,~,~] = getLFTModel(tsys);
Obtain the transformation separately on the model from decomposed sys.
H2 = ss2ss(H,T);
Compare this transformed model with the model from decomposed tsys.
isequal(H1,H2)
ans = logical
1
Both models are equal.
The file icEngine.mat contains one data set with 1500 input-output samples collected at the a sampling rate of 0.04 seconds. The input u(t) is the voltage (V) controlling the By-Pass Idle Air Valve (BPAV), and the output y(t) is the engine speed (RPM/100).
Use the data in icEngine.mat to create a state-space model with identifiable parameters.
load icEngine.mat z = iddata(y,u,0.04); sys = n4sid(z,4,'InputDelay',2);
Specify a random transformation matrix.
T = randn(4);
Obtain the transformation.
sysT = ss2ss(sys,T);
Compare the frequency responses.
bode(sys,'b',sysT,'r--') legend
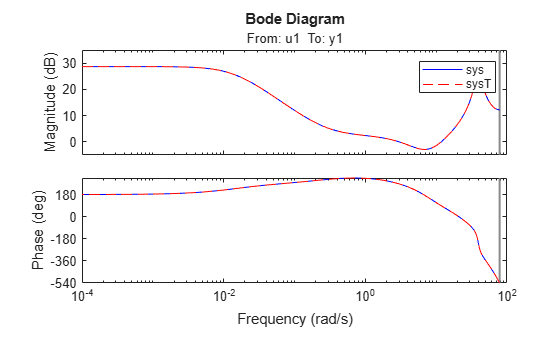
The responses match closely.
ss2ss also lets you perform similarity transformation for models with complex coefficients.
For this example, generate a random state-space model with complex coefficients.
rng(0) sys = ss(randn(5)+1i*randn(5),randn(5,3),randn(2,5)+1i*randn(2,5),0,.1);
Specify a transformation matrix containing complex data.
T = randn(5)+1i*randn(5);
Obtain the transformation.
sysT = ss2ss(sys,T);
Compare the singular values of the frequency response.
sigma(sys,'b',sysT,'r--') legend
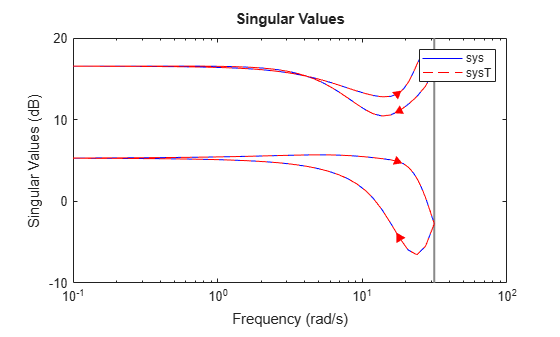
The responses match closely for both branches.
Input Arguments
Output Arguments
Algorithms
ss2ss performs the similarity transformation on the state vector x of a state-space model.
This table summarizes the transformations returned by ss2ss for each
model form.
| Input Model | Transformed Model |
|---|---|
Explicit state-space models of the form: |
|
Descriptor (implicit) state-space models for the form: |
|
Identified state-space ( |
|