getComponents
Extract SISO control components from a 2-DOF PID controller
Description
[
decomposes the 2-DOF PID controller C,X] =
getComponents(C2,looptype)C2 into two SISO control
components. One of the control components, C, is a 1-DOF PID
controller. The other, X, is a SISO dynamic system. When
C and X are connected in the loop
structure specified by looptype, the resulting closed-loop
system is equivalent to the 2-DOF control loop.
For more information about 2-DOF PID control architectures, see Two-Degree-of-Freedom PID Controllers.
Examples
Input Arguments
2-DOF PID controller to decompose, specified as a
pid2 or pidstd2 controller
object.
Loop structure for decomposing the 2-DOF controller, specified as
'feedforward', 'feedback', or
'filter'. These correspond to the following control
decompositions and architectures:
'feedforward'—Cis a conventional SISO PID controller that takes the error signal as its input.Xis a feedforward controller, as shown: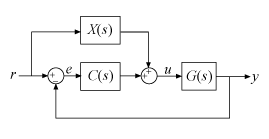
If
C2is a continuous-time, parallel-form controller, then the components are given by:The following command constructs the closed-loop system from r to y for the feedforward configuration.
T = G*(C+X)*feedback(1,G*C);
'feedback'—Cis a conventional SISO PID controller that takes the error signal as its input.Xis a feedback controller from y to u, as shown: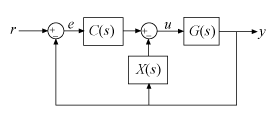
If
C2is a continuous-time, parallel-form controller, then the components are given by:The following command constructs the closed-loop system from r to y for the feedback configuration.
T = G*C*feedback(1,G*(C+X));
'filter'—Xis a prefilter on the reference signal.Cis a conventional SISO PID controller that takes as its input the difference between the filtered reference and the output, as shown: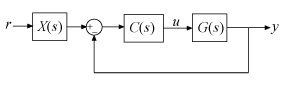
If
C2is a continuous-time, parallel-form controller, then the components are given by:The following command constructs the closed-loop system from r to y for the filter configuration.
T = X*feedback(G*C,1);
The formulas shown above pertain to continuous-time, parallel-form
controllers. Standard-form controllers and controllers in discrete time can
be decomposed into analogous configurations. The
getComponents command works on all 2-DOF PID
controller objects.
Output Arguments
Version History
Introduced in R2015b