Image Statistics
Calculate mean, variance, and standard deviation
Libraries:
Vision HDL Toolbox /
Statistics
Description
The Image Statistics block calculates the mean, variance, and standard deviation of streaming video data. Each calculation is performed over all pixels in the input region of interest (ROI). The block implements the calculations by using hardware-efficient algorithms.
Ports
This
block uses a streaming pixel interface with a bus for frame control signals. This interface
enables the block to operate independently of image size and format. The
pixel input port supports single pixel streaming or multipixel
streaming. Single pixel streaming accepts a single pixel value each clock cycle. Multipixel
streaming accepts a vector of M pixels per clock cycle to support
high-frame-rate or high-resolution formats. The M value corresponds to the
Number of pixels parameter of the Frame
To Pixels block. Along with the pixel, the block accepts a
pixelcontrol bus that contains five control signals. The control signals
indicate the validity of each pixel and their location in the frame. For multipixel streaming,
one set of control signals applies to all pixels in the vector. To convert a frame (pixel
matrix) into a serial pixel stream and control signals, use the Frame
To Pixels block. For a full description of the interface, see Streaming Pixel Interface.
Input
Output
Parameters
Tips
To change the size and dimensions of the ROI, you can manipulate the input video stream control signals. See Regions of Interest.
The number of valid pixels in the input image affects the accuracy of the mean approximation. To avoid approximation error, use an image that contains a multiple of 64n pixels, up to 64n+1 pixels, where n equals 0, 1, 2, or 3. For details of the mean approximation, see Algorithm.
The block calculates statistics over frames up to 644 (16, 777, 216) pixels in size. This size supports HD frames.
Algorithms
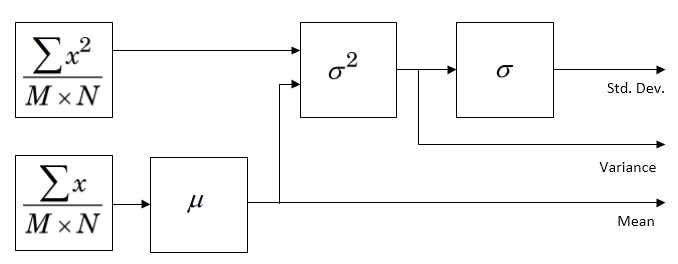
The calculations of mean, variance, and standard deviation build off each other. For hardware efficiency, the calculation logic is shared as shown.
For multipixel input, the block implements an extra accumulator stage at the beginning of the calculations.
The equation to calculate the precise mean pixel value requires large internal word lengths and expensive division logic.
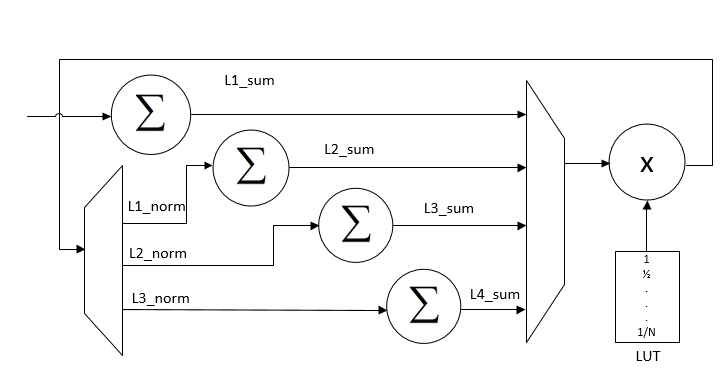
Instead of using this equation, the block calculates the mean by a series of four accumulators that compute the mean of a segment of pixels. First, the block finds the sum of a window of 64 pixels, and normalizes.
Then it accumulates 64 of the previous windows, and normalizes.
A third accumulator sums 64 of the 64×64 windows, and normalizes the same way.
The fourth accumulator sums 64 of the 64×64×64 windows and normalizes.
Each valid pixel is accumulated as it arrives. Its location within a line or frame does not affect the accumulation logic.
When vEnd is received, the block promotes any remaining data in the
four levels of mean calculation to calculate the final output. If an accumulator counter
is not at 64 when vEnd arrives, that level normalizes by the actual
value of the counter. The constants for this multiplication are stored in a lookup table
(LUT). The four accumulators share a single LUT and multiplier. The values in the LUT are
in ufix18_en17 data type so that the multiplier fits into a DSP block
on an FPGA.
This method of mean calculation is accurate when the number of pixels in the frame
aligns vEnd with the final accumulator rollover. This alignment occurs
at level 2 when the frame contains a multiple of 64 pixels, and fewer than
642(4096) pixels. It occurs at level 3 when the frame
contains a multiple of 4096 pixels. It occurs at level 4 when the frame contains a
multiple of 643 pixels. This method is also accurate when the
frame has fewer than 64 pixels, because only the first accumulator is needed.
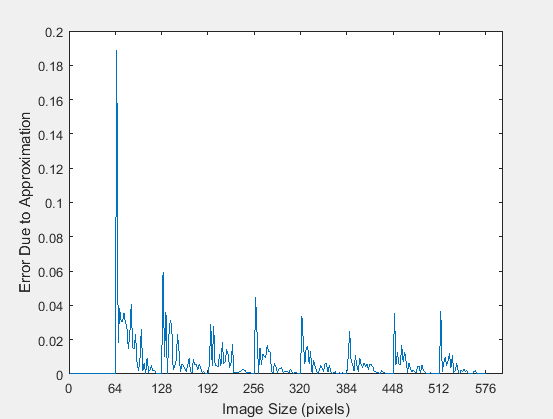
However, when the number of pixels in the frame does not fit these conditions, the block must normalize the final accumulation before the counter reaches 64. This normalization introduces an error in the calculation at subsequent levels. The figure shows the normalization error introduced in the mean calculation by image sizes under 4096 pixels. The spikes occur where an image size is just over a multiple of 64 pixels.
For images larger than 4096 pixels, the same effect occurs at multiples of 4096 pixels, and at multiples of 643 pixels.
The block calculates the variance of the input pixels by using this equation:
The mean and the mean of the squared input are calculated in parallel. The block calculates the mean of squares using the same approximation method used to calculate the mean, as described in the previous section.
The block calculates the square root of the variance by using a pipelined bit-set-and-check algorithm. This algorithm computes the square root by using addition and shifts, rather than multipliers. For an N-bit input, the result has N bits of accuracy.
This method is hardware efficient for general inputs. If your data has known characteristics that allow for a more efficient square root implementation, you can disable the calculation in this block and construct your own logic from HDL-supported blocks.
Extended Capabilities
Version History
Introduced in R2015aSee Also
2-D
Mean (Computer Vision Toolbox) | 2-D
Variance (Computer Vision Toolbox) | 2-D
Standard Deviation (Computer Vision Toolbox) | Frame To Pixels | visionhdl.ImageStatistics