Birds-Eye View
Transform front-facing camera image into top-down view
Libraries:
Vision HDL Toolbox /
Geometric Transforms
Description
The Birds-Eye View block warps a front-facing camera image into a top-down view. It uses a hardware-efficient architecture that supports HDL code generation. This block also requires the Computer Vision Toolbox™ product.
You must provide the homography matrix that describes the transform. This matrix can be calculated from physical camera properties, or empirically derived by analyzing an image of a grid pattern taken by the camera. The block uses the matrix to compute the transformed coordinates of each pixel. The transform does not interpolate between pixel locations. Instead it rounds the result to the nearest coordinate.
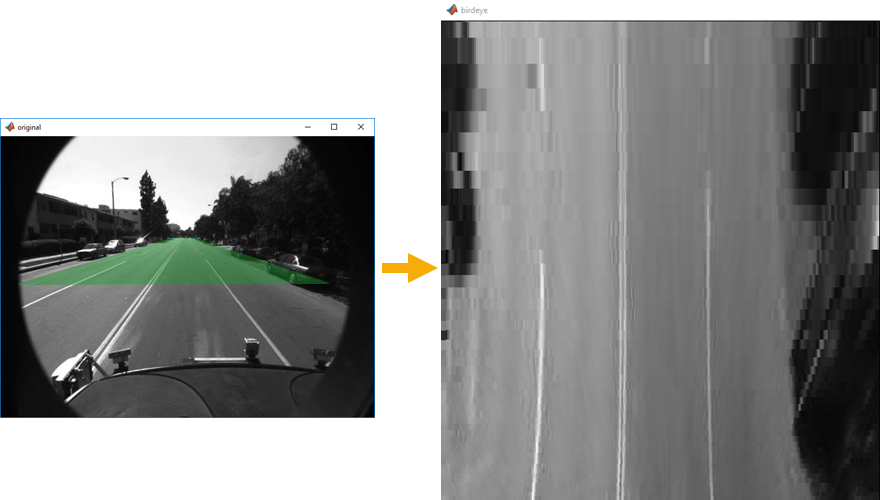
The block operates on a trapezoidal region of the input image below the vanishing point. These images show the input region selected for transformation and the resulting top-down view.
You can specify the number of lines in the transformed region and the size of the output frame. If the specified homography matrix cannot map from the requested number of lines to the requested output size, the block returns a warning.
Because the block replicates lines from the input region to create the larger output frame, it cannot complete the transform of one frame before the next frame arrives. The block ignores any new input frames while it is still transforming the previous frame. Therefore, depending on the stored lines and output size, the block can drop input frames. This timing also enables the block to maintain the blanking intervals of the input pixel stream.
Examples

Lane Detection
Implement a lane-marking detection algorithm for FPGAs.
Ports
This block uses a streaming pixel interface with a
pixelcontrol bus for frame control signals. This interface enables the
block to operate independently of image size and format. All Vision HDL Toolbox™ blocks use the same streaming interface. The block accepts and returns a scalar
pixel value and a bus that contains five control signals. The control signals indicate the
validity of each pixel and its location in the frame. To convert a frame (pixel matrix) into a
serial pixel stream and control signals, use the Frame
To Pixels block. For a full description of the interface, see Streaming Pixel Interface.
Input
Output
Parameters
Algorithms
The transform from input pixel coordinate (x,y) to the bird's-eye pixel coordinate is derived from the homography matrix, h. The homography matrix is based on physical parameters and therefore is a constant for a particular camera installation.
The implementation of the bird's-eye transform in hardware does not directly perform this calculation. Instead, the block precomputes lookup tables for the horizontal and vertical aspects of the transform.
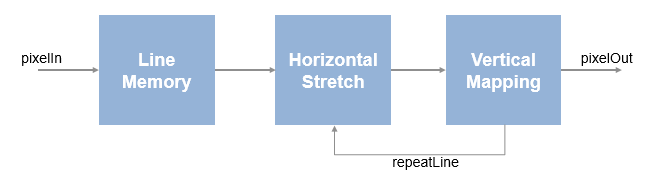
First, the block stores the input lines starting from the precomputed vanishing point. The stored pixels form a trapezoid, with short lines near the vanishing point and wider lines near the camera. This storage uses Maximum buffer size, in pixels memory locations.
The horizontal lookup table contains interpolation parameters that describe the stretch of each line of the trapezoidal input region to the requested width of the output frame. Lines that fall closer to the vanishing point are stretched more than lines nearer to the camera.
The vertical lookup table contains the y-coordinate mapping, and how many times each line is repeated to fill the requested height of the output frame. Near the vanishing point, one input line maps to many output lines, while each line nearer the camera maps to a diminishing number of output lines.
The lookup tables use 3*Number of input lines to buffer memory locations.
Extended Capabilities
Version History
Introduced in R2017b
See Also
Blocks
- Frame To Pixels | Warp (Computer Vision Toolbox)
Objects
Functions
imwarp(Image Processing Toolbox) |estimateGeometricTransform(Computer Vision Toolbox)
Topics
- Using the Single Camera Calibrator App (Computer Vision Toolbox)