detectSIFTFeatures
Description
points = detectSIFTFeatures(I,Name=Value)detectSIFTFeatures(I,ContrastThreshold=0.0133) detects SIFT features
with a contrast of less than 0.0133.
Examples
Load an image.
I = imread('cameraman.tif');Detect SIFT features in the image.
points = detectSIFTFeatures(I);
Display the results.
imshow(I);
hold on;
plot(points.selectStrongest(10))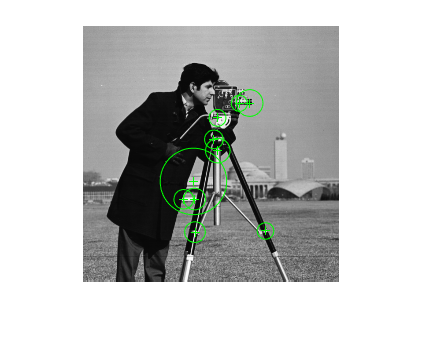
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Lowe, David G. "Distinctive Image Features from Scale-Invariant Keypoints." International Journal of Computer Vision 60, no. 2 (November 2004): 91--110.
Extended Capabilities
Version History
Introduced in R2021b
See Also
Objects
Functions
detectBRISKFeatures|detectFASTFeatures|detectKAZEFeatures|detectORBFeatures|detectMinEigenFeatures|detectHarrisFeatures|detectMSERFeatures|detectSURFFeatures|extractFeatures|matchFeatures