Swept Sine Reference Generator
Generate swept-sine maneuver reference signals
Description
The Swept Sine Reference Generator block sets the parameters that configure the swept-sine maneuver. Once the vehicle reaches the target longitudinal velocity, the block generates a sinusoidal steering command with linearly increasing frequency, up to the maximum specified in the allotted time.
Use the Steady-state solver mode parameter
to specify the initial conditions for the maneuver. By default, the parameter is set to
Initialize from model, and the simulation starts with the vehicle
at rest at the specified initial position. If you want to start the simulation at the non-zero
steady-state velocity:
Set Steady-state solver mode to
Solve using block parameters.On the Steady-State Solver tab, specify the initial conditions, workspace variable, and solver settings. Click Generate steady state solution.
After the simulation completes, set Steady-state solver mode to
Resume from a workspace variable.Set Steady-state solution to start from, ssVar to the workspace variable you specified in step 2.
Run the simulation.
Examples
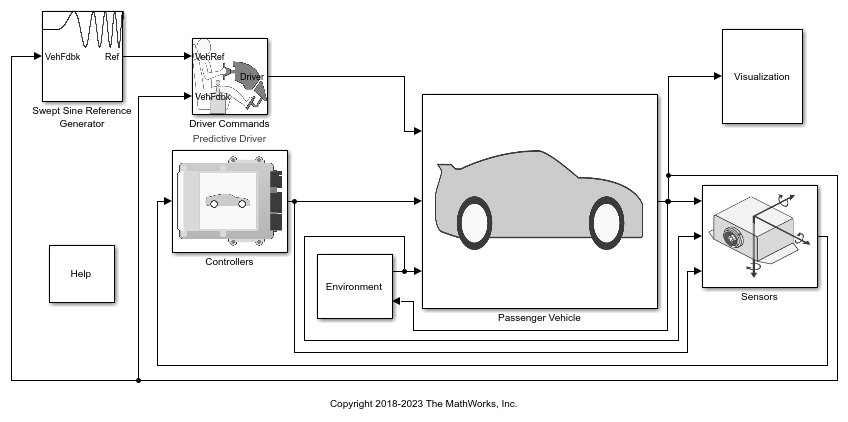
Swept-Sine Steering Reference Application
Simulate a full vehicle dynamics model undergoing a swept sine steering maneuver. Use for vehicle dynamics ride and handling analysis and chassis controls development, including the dynamic steering response.
Ports
Input
Output
Parameters
Version History
Introduced in R2019a