Driver Commands
Configure driver
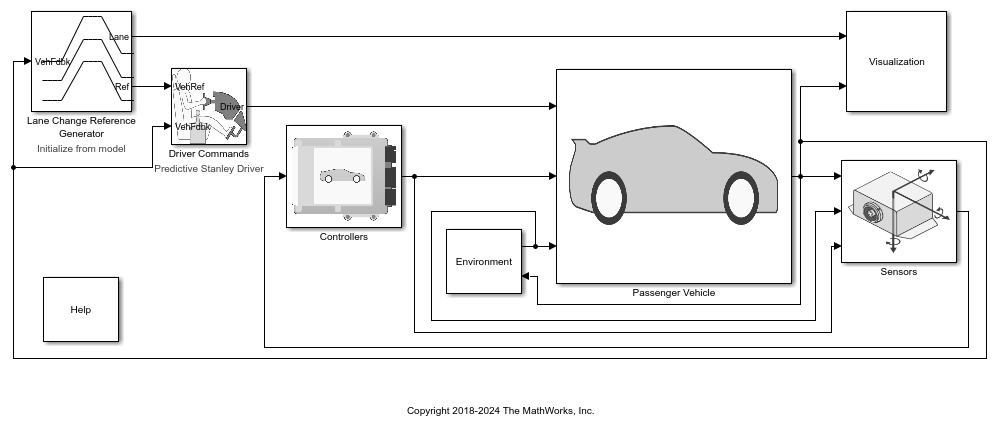
Description
The Driver Commands block implements the driver model that the reference application uses to generate acceleration, braking, gear, and steering commands. By default, if you select the Reference Generator block parameter Use maneuver-specific driver, initial position, and scene, the reference application selects the driver for the maneuver that you specified.
Vehicle Command Mode Setting | Implementation |
|---|---|
| Longitudinal Driver block — Longitudinal speed-tracking controller. Based on reference and feedback velocities, the block generates normalized acceleration and braking commands that can vary from 0 through 1. Use the block to model the dynamic response of a driver or to generate the commands necessary to track a longitudinal drive cycle. |
| Predictive Driver block — Controller that generates normalized steering, acceleration, and braking commands to track longitudinal velocity and a lateral reference displacement. The normalized commands can vary between -1 to 1. The controller uses a single-track (bicycle) model for optimal single-point preview control. |
| Implements an open-loop system so that you can configure the reference application for constant or signal-based steering, acceleration, braking, and gear command input. |
Examples
Double Lane Change Reference Application
Simulate a full vehicle dynamics model undergoing a double lane change maneuver standard ISO 3888-2. Use for vehicle dynamics ride and handling analysis and chassis controls development, including yaw stability and lateral acceleration limits.
Ports
Input
Output
Parameters
Version History
Introduced in R2019a