Solid Axle Suspension - Coil Spring
Solid axle suspension with coil spring

Libraries:
Vehicle Dynamics Blockset /
Suspension
Description
The Solid Axle Suspension - Coil Spring block implements a solid axle suspension with a coil spring for multiple axles with multiple wheels per axle.
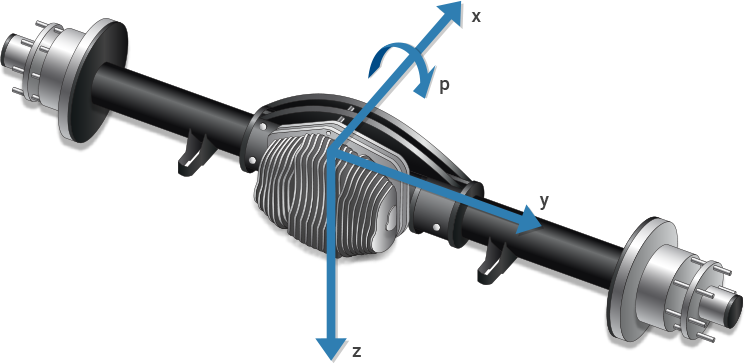
The block models the suspension compliance, damping, and geometric effects as functions of the wheel positions and velocities, with axle-specific compliance and damping parameters. Using the wheel position and velocity, the block calculates the vertical wheel position and suspension forces on the vehicle and wheel. The block uses the Z-down coordinate system (defined in SAE J670) and a solid axle coordinate system. The solid axle coordinate system is aligned with the Z-down vehicle coordinate system, with the x-axis in the direction of forward vehicle motion.
This table describes the settings you can specify for each suspension element.
| Suspension Element | Setting |
|---|---|
Axle |
|
Wheel |
|
The block contains energy-storing spring elements and energy-dissipating damper elements. The block also stores energy via the axle roll angular acceleration and axle center of mass vertical and lateral acceleration.
This table summarizes the block parameter settings for a vehicle with:
Two axles
Two wheels per axle
Steering angle input for both wheels on the front axle
| Parameter | Setting |
|---|---|
| Number of axles, NumAxl |
|
Number of wheels by axle, NumWhlsByAxl |
|
| Steered axle enable by axle, StrgEnByAxl |
|
The block uses the wheel number, t, to index the input and output signals. This table summarizes the wheel, axle, and corresponding wheel number for a vehicle with:
Two axles
Two wheels per axle
| Wheel | Axle | Wheel Number |
|---|---|---|
| Front left | Front | 1 |
| Front right | Front | 2 |
| Rear left | Rear | 1 |
| Rear right | Rear | 2 |
Suspension Compliance and Damping
The block uses a linear spring and damper to model the vertical dynamic effects of the suspension system on the vehicle and wheel. Specifically, the block:
|
Uses |
To Calculate |
|---|---|
|
|
To calculate the dynamics of the axle, the block implements these equations. The block neglects the effects of:
Lateral and longitudinal translational velocity.
Angular velocity about the vertical and lateral axes.
The net vertical force on the axle center of mass is the sum of the wheel and suspension forces acting on the axle.
The net moment about the roll axis of the solid axle suspension accounts for the hardpoint coordinates of the suspension and wheels.
Block parameters provide the track and suspension hardpoints coordinates.
The block uses Euler angles to transform the track and suspension displacements, velocities, and accelerations to the vehicle coordinate system.
To calculate the suspension forces applied to the vehicle, the block implements this equation.
The suspension forces and moments applied to the vehicle are equal to the suspension forces and moments applied to the wheel.
To calculate the vertical force applied to the suspension at the wheel location, the block implements a stiff spring-damper, shown here.
The block uses this equation.
The equations use these variables.
| Fwza,t, Mwza,t | Suspension force and moment applied to the
wheel on axle |
| Fwxa,t, Mwxa,t | Suspension force and moment applied to the
wheel on axle |
| Fwya,t, Mwya,t | Suspension force and moment applied to the
wheel on axle |
| Fvza,t, Mvza,t | Suspension force and moment applied to the
vehicle on axle |
| Fvxa,t, Mvxa,t | Suspension force and moment applied to the
vehicle on axle |
| Fvya,t, Mvya,t | Suspension force and moment applied to the
vehicle on axle |
| Fz0a | Vertical suspension spring preload force
applied to the wheels on axle |
| kza | Vertical spring constant applied to wheels on
axle |
| kwaz | Wheel and axle interface compliance constant |
| mhsteera | Steering angle to vertical force slope
applied at wheel carrier for wheels on axle
|
| δsteera,t | Steering angle input for axle
|
| cza | Vertical damping constant applied to wheels
on axle |
| cwaz | Wheel and axle interface damping constant |
| Rewa,t | Effective wheel radius for axle
|
| Fzhstopa,t | Vertical hardstop force at axle
|
| Fzaswya,t | Vertical anti-sway force at axle
|
| Fwaz0 | Wheel and axle interface compliance constant |
| zva,t, żva,t | Vehicle displacement and velocity at axle
|
| zwa,t, żwa,t | Wheel displacement and velocity at axle
|
| xva,t, ẋva,t | Vehicle displacement and velocity at axle
|
| xwa,t, ẋwa,t | Wheel displacement and velocity at axle
|
| yva,t, ẏva,t | Vehicle displacement and velocity at axle
|
| ywa,t, ẏwa,t | Wheel displacement and velocity at axle
|
| Ha,t | Suspension height at axle
|
| Rewa,t | Effective wheel radius at axle
a, wheel t |
Hardstop Forces
The hardstop feedback force, Fzhstopa,t, that the block applies depends on whether the suspension is compressing or extending. The block applies the force:
In compression, when the suspension is compressed more than the maximum distance specified by the Suspension maximum height, Hmax parameter
In extension, when the suspension extension is greater than maximum extension specified by the Suspension maximum height, Hmax parameter
To calculate the force, the block uses a stiffness based on a hyperbolic tangent and exponential scaling.
Camber, Caster, and Toe Angles
To calculate the camber, caster, and toe angles, block uses linear functions of the suspension height and steering angle.
The equations use these variables.
| ξa,t | Camber angle of wheel on axle |
| ηa,t | Caster angle of wheel on axle |
| ζa,t | Toe angle of wheel on axle |
| ξ0a, η0a, ζ0a |
Nominal suspension axle a camber, caster, and toe angles, respectively, at zero steering angle |
| mhcambera, mhcastera, mhtoea |
Camber, caster, and toe angles, respectively, versus suspension height slope for
axle |
| mcambersteera, mcastersteera, mtoesteera |
Camber, caster, and toe angles, respectively, versus steering angle slope for
axle |
| mhsteera |
Steering angle versus vertical force slope for axle |
| δsteera,t | Steering angle input for axle |
| zva,t | Vehicle displacement at axle |
| zwa,t | Wheel displacement at axle |
Steering Angles
Optionally, use the Steered axle enable by axle, StrgEnByAxl parameter to input steering angles for the wheels. To calculate the steering angles for the wheels, the block offsets the input steering angles with a linear function of the suspension height.
The equation uses these variables.
| mtoesteera |
Axle |
| mhsteera |
Axle |
| mhtoea |
Axle |
| δwhlsteera,t | Wheel steering angle for axle |
| δsteera,t | Steering angle input for axle |
| zva,t | Vehicle displacement at axle |
| zwa,t | Wheel displacement at axle |
Power and Energy
The block calculates these suspension characteristics for each axle,
a, wheel,
t.
| Calculation | Equation |
|---|---|
Dissipated power, Psuspa,t |
|
Absorbed energy, Esuspa,t |
|
Suspension height, Ha,t |
|
Distance from wheel carrier center to tire/road interface |
|
The equations use these variables.
| mhsteera | Steering angle
to vertical force slope applied at wheel carrier
for wheels on axle
|
| δsteera,t | Steering angle
input for axle |
| Rewa,t | Axle
|
| Fz0a | Vertical
suspension spring preload force applied to the
wheels on axle |
| zwtra,t | Distance from wheel carrier center to tire/road interface, along the inertial-fixed z-axis |
| zva,t, żva,t | Vehicle
displacement and velocity at axle
|
| zwa,t, żwa,t | Wheel
displacement and velocity at axle
|
Examples
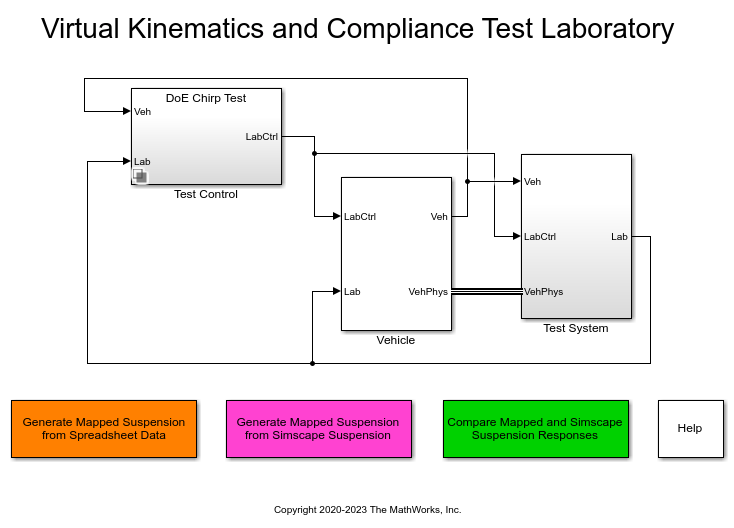
Kinematics and Compliance Virtual Test Laboratory Reference Application
Generate optimized suspension parameters for the vehicle dynamics mapped suspension blocks.
Ports
Input
Output
Parameters
References
[1] Gillespie, Thomas. Fundamentals of Vehicle Dynamics. Warrendale, PA: Society of Automotive Engineers, 1992.
[2] Vehicle Dynamics Standards Committee. Vehicle Dynamics Terminology. SAE J670. Warrendale, PA: Society of Automotive Engineers, 2008.
[3] Technical Committee. Road vehicles — Vehicle dynamics and road-holding ability — Vocabulary. ISO 8855:2011. Geneva, Switzerland: International Organization for Standardization, 2011.
[4] Unrau, H.-J., and Zamow J. TYDEX-Format: Description and Reference Manual. Release 1.3, 1997.