UAV Scenario Motion Read
Libraries:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Description
Use this block to read motion as a bus from a sensor or platform in a UAV scenario simulation. The motion bus contains the position, orientation, velocity, angular velocity, acceleration, and ID of the platform or sensor.
To use this block, ensure that a UAV Scenario Configuration block is in your model.
This block uses the sample time specified in the UAV Scenario Configuration block.
Examples
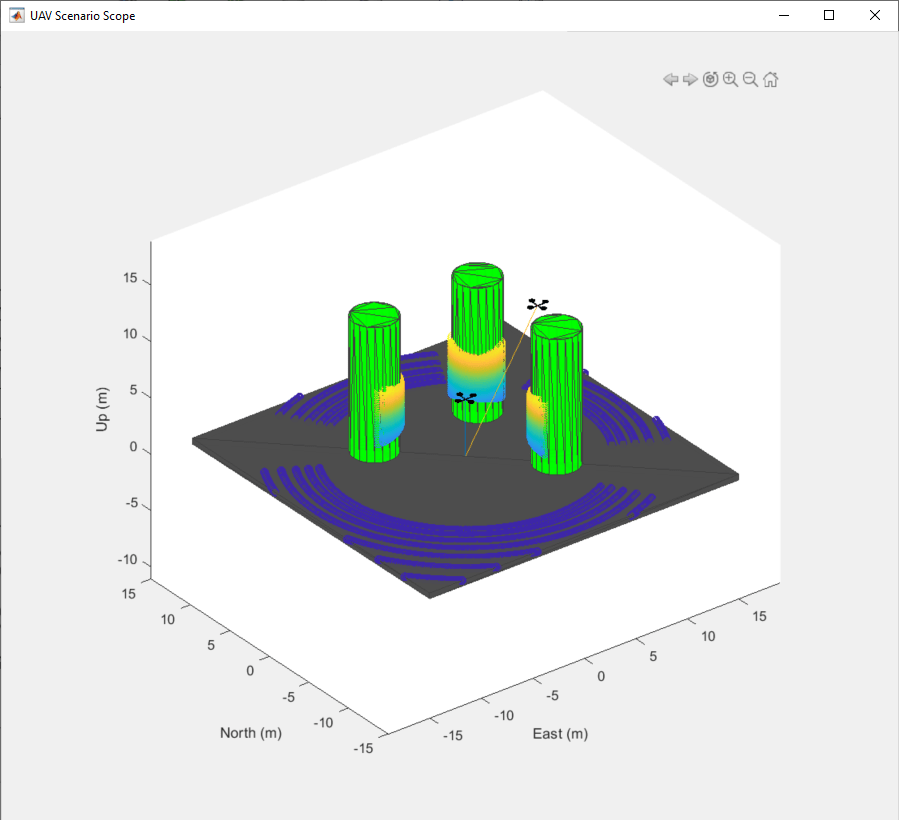
Simulate UAV Scenario Using Scenario Blocks
Use the UAV scenario blocks to simulate a scenario in Simulink®.
Limitations
The UAV Scenario block does not support:
Code generation
Model reference
Multiple instances of the UAV Scenario Configuration block
Rapid acceleration mode
In addition, the execution order is important when using these blocks in a closed loop simulation. The UAV Scenario Configuration block must execute first. The UAV Scenario Motion Write block must execute before the UAV Scenario Motion Read, UAV Scenario Lidar, and UAV Scenario Scope blocks.