Detect Drift
Libraries:
Statistics and Machine Learning Toolbox /
Incremental Learning /
Drift Detection
Description
The Detect Drift block updates the internal statistics and drift status of a drift detector when given new data.
Import an initialized incremental concept drift detector object (incrementalConceptDriftDetector) into the block by specifying the name of a
workspace variable that contains the object. The input port x receives a
data stream for which the drift is evaluated. The input port reset
receives a signal that resets the internal states of the drift detector. The output port
IsWarm returns a value indicating if the drift detector is warm, which
means that it tracks the drift status. The output port status returns the
current drift status. The optional input port w receives observation
weights.
Examples
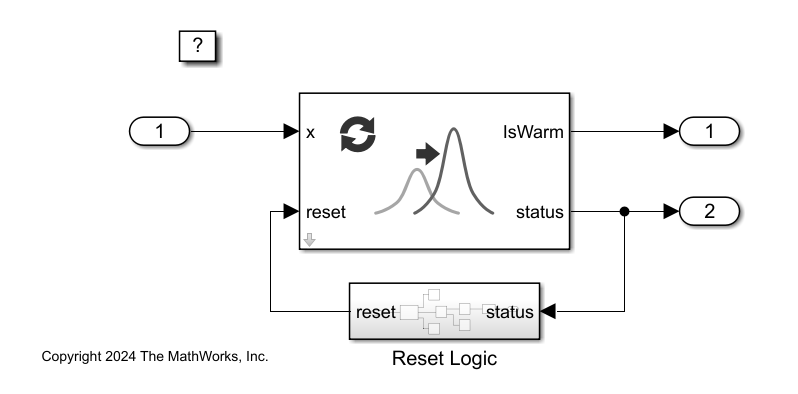
Monitor Drift Using Detect Drift Block
Use the Detect Drift block for monitoring drift in a data stream in Simulink®. The block detects drift in an input datastream using a configured incremental concept drift detector (incrementalConceptDriftDetector) and outputs the drift status. The sample reset logic provided with the example enables the block to reset the internal statistics of the drift detector upon detecting a drift in the data.
Ports
Input
Output
Parameters
To edit block parameters interactively, use the Property Inspector. From the Simulink® Toolstrip, on the Simulation tab, in the Prepare gallery, select Property Inspector.
Main
Specify the name of a workspace variable that contains the configured incrementalConceptDriftDetector object.
Programmatic Use
Block Parameter:
DriftDetector |
| Type: character vector or string |
Values:
incrementalConceptDriftDetector object name |
Default:
"IncCDDetector" |
Specify the discrete interval between sample time hits or specify another type of sample
time, such as continuous (0) or inherited (–1). For more
options, see Types of Sample Time (Simulink).
By default, the Detect Drift block inherits sample time based on the context of the block within the model.
Programmatic Use
Block Parameter:
SystemSampleTime |
| Type: string scalar or character vector |
| Values: scalar |
Default:
"–1" |
Data Types
Fixed-Point Operational Parameters
Data Type
Specify the data type for the drift status
output. The type can be inherited, specified directly, or expressed as a data type
object such as Simulink.NumericType.
When you select Inherit: auto, the block uses a rule that
inherits the data type.
For more information about data types, see Control Data Types of Signals (Simulink).
Click the Show data type
assistant button ![]() to display the Data Type
Assistant, which helps you set the data type attributes. For more
information, see Specify Data Types Using Data Type Assistant (Simulink).
to display the Data Type
Assistant, which helps you set the data type attributes. For more
information, see Specify Data Types Using Data Type Assistant (Simulink).
Programmatic Use
Block Parameter:
DriftStatusDataTypeStr |
| Type: character vector or string |
Values: "Inherit: auto"
| "double" | "single" |
"half" | "int8" |
"uint8" | "int16" |
"uint16" | "int32" |
"uint32" | "int64" |
"uint64" | "boolean" |
"fixdt(1,16,0)" | "fixdt(1,16,2^0,0)" |
"<data type expression>" |
Default: "Inherit: auto"
|
Specify the lower value of the drift status range that Simulink checks.
Simulink uses the minimum value to perform:
Parameter range checking for some blocks (see Specify Minimum and Maximum Values for Block Parameters (Simulink)).
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes, such as software-in-the-loop (SIL) mode or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Programmatic Use
Block Parameter:
DriftStatusOutMin |
| Type: character vector |
Values: '[]' |
scalar |
Default: '[]' |
Specify the upper value of the drift status range that Simulink checks.
Simulink uses the maximum value to perform:
Parameter range checking for some blocks (see Specify Minimum and Maximum Values for Block Parameters (Simulink)).
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes, such as software-in-the-loop (SIL) mode or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Programmatic Use
Block Parameter:
DriftStatusOutMax |
| Type: character vector |
Values: '[]' |
scalar |
Default: '[]' |
Specify the data type of the mean (moving average of input observations). The type
can be inherited, specified directly, or expressed as a data type object such as
Simulink.NumericType.
For more information about data types, see Control Data Types of Signals (Simulink).
Click the Show data type
assistant button ![]() to display the Data Type
Assistant, which helps you set the data type attributes. For more
information, see Specify Data Types Using Data Type Assistant (Simulink).
to display the Data Type
Assistant, which helps you set the data type attributes. For more
information, see Specify Data Types Using Data Type Assistant (Simulink).
Programmatic Use
Block Parameter:
MeanDataTypeStr |
| Type: character vector or string |
Values: "Inherit: auto"
| "double" | "single" |
"half" | "int8" |
"uint8" | "int16" |
"uint16" | "int32" |
"uint32" | "int64" |
"uint64" | "fixdt(1,16,0)" |
"fixdt(1,16,2^0,0)" | "<data type
expression>" |
Default: "Inherit: auto"
|
Specify the lower value of the mean range that Simulink checks.
Simulink uses the minimum value to perform:
Parameter range checking for some blocks (see Specify Minimum and Maximum Values for Block Parameters (Simulink)).
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes, such as software-in-the-loop (SIL) mode or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Programmatic Use
Block Parameter:
MeanOutMin |
| Type: character vector |
Values: '[]' |
scalar |
Default: '[]' |
Specify the upper value of the mean range that Simulink checks.
Simulink uses the maximum value to perform:
Parameter range checking for some blocks (see Specify Minimum and Maximum Values for Block Parameters (Simulink)).
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes, such as software-in-the-loop (SIL) mode or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Programmatic Use
Block Parameter:
MeanOutMax |
| Type: character vector |
Values: '[]' |
scalar |
Default: '[]' |
Specify the data type of the variance (moving variance of input observations). The
type can be inherited, specified directly, or expressed as a data type object such as
Simulink.NumericType.
For more information about data types, see Control Data Types of Signals (Simulink).
Click the Show data type
assistant button ![]() to display the Data Type
Assistant, which helps you set the data type attributes. For more
information, see Specify Data Types Using Data Type Assistant (Simulink).
to display the Data Type
Assistant, which helps you set the data type attributes. For more
information, see Specify Data Types Using Data Type Assistant (Simulink).
Programmatic Use
Block Parameter:
VarianceDataTypeStr |
| Type: character vector or string |
Values: "Inherit: auto"
| "double" | "single" |
"half" | "int8" |
"uint8" | "int16" |
"uint16" | "int32" |
"uint32" | "int64" |
"uint64" | "fixdt(1,16,0)" |
"fixdt(1,16,2^0,0)" | "<data type
expression>" |
Default: "Inherit: auto"
|
Specify the lower value of the variance range that Simulink checks.
Simulink uses the minimum value to perform:
Parameter range checking for some blocks (see Specify Minimum and Maximum Values for Block Parameters (Simulink)).
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes, such as software-in-the-loop (SIL) mode or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Programmatic Use
Block Parameter:
VarianceOutMin |
| Type: character vector |
Values: '[]' |
scalar |
Default: '[]' |
Specify the upper value of the variance range that Simulink checks.
Simulink uses the maximum value to perform:
Parameter range checking for some blocks (see Specify Minimum and Maximum Values for Block Parameters (Simulink)).
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes, such as software-in-the-loop (SIL) mode or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Programmatic Use
Block Parameter:
VarianceOutMax |
| Type: character vector |
Values: '[]' |
scalar |
Default: '[]' |
Specify the data type of the weights sum (moving sum of weighted input
observations). The type can be inherited, specified directly, or expressed as a data
type object such as Simulink.NumericType.
For more information about data types, see Control Data Types of Signals (Simulink).
Click the Show data type
assistant button ![]() to display the Data Type
Assistant, which helps you set the data type attributes. For more
information, see Specify Data Types Using Data Type Assistant (Simulink).
to display the Data Type
Assistant, which helps you set the data type attributes. For more
information, see Specify Data Types Using Data Type Assistant (Simulink).
Programmatic Use
Block Parameter:
WeightsSumDataTypeStr |
| Type: character vector or string |
Values: "Inherit: auto"
| "double" | "single" |
"half" | "int8" |
"uint8" | "int16" |
"uint16" | "int32" |
"uint32" | "int64" |
"uint64" | "fixdt(1,16,0)" |
"fixdt(1,16,2^0,0)" | "<data type
expression>" |
Default: "Inherit: auto"
|
Specify the lower value of the weights sum range that Simulink checks.
Simulink uses the minimum value to perform:
Parameter range checking for some blocks (see Specify Minimum and Maximum Values for Block Parameters (Simulink)).
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes, such as software-in-the-loop (SIL) mode or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Programmatic Use
Block Parameter:
WeightsSumOutMin |
| Type: character vector |
Values: '[]' |
scalar |
Default: '[]' |
Specify the upper value of the weights sum range that Simulink checks.
Simulink uses the maximum value to perform:
Parameter range checking for some blocks (see Specify Minimum and Maximum Values for Block Parameters (Simulink)).
Simulation range checking (see Specify Signal Ranges (Simulink) and Enable Simulation Range Checking (Simulink)).
Optimization of the code that you generate from the model. This optimization can remove algorithmic code and affect the results of some simulation modes, such as software-in-the-loop (SIL) mode or external mode. For more information, see Optimize using the specified minimum and maximum values (Embedded Coder).
Programmatic Use
Block Parameter:
WeightsSumOutMax |
| Type: character vector |
Values: '[]' |
scalar |
Default: '[]' |
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Extended Capabilities
Version History
Introduced in R2024b