Second-Order Filter
Discrete-time or continuous-time low-pass, high-pass, band-pass, or band-stop second-order filter
Libraries:
Simscape /
Electrical /
Control /
General Control
Description
The Second-Order Filter block implements different types of second-order filters. Filters are useful for attenuating noise in measurement signals.
The block provides these filter types:
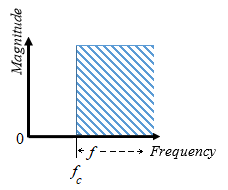
Low pass — Allows signals, , only in the range of frequencies below the cutoff frequency, , to pass.
High pass — Allows signals, , only in the range of frequencies above the cutoff frequency, , to pass.
Band pass — Allows signals, , only in the range of frequencies between two cutoff frequencies, and , to pass.
Band stop — Prevents signals, , only in the range of frequencies between two cutoff frequencies, and , from passing.
| Filter Type | Frequency Range, | |
|---|---|---|
| Low-Pass |
| |
| High-Pass |
| |
| Band-Pass |
| |
| Band-Stop |
| |



Equations
The second order derivative state equation for the filter is:
Where:
x is the filter internal state.
u is the filter input.
ωn is the filter natural frequency.
ζ is the filter damping factor.
For each filter type, the table maps the block output, , as a function of the internal state of the filter, to the s-domain transfer function, .
| Filter Type | Output, | Transfer Function, |
|---|---|---|
| Low-Pass | ||
| High-Pass | ||
| Band-Pass | ||
| Band-Stop |
For Initialization:
Where:
is the initial state of the filter.
is the initial input to the filter.
is the AC component of the steady-state initial input.
is the initial amplitude.
is the initial phase.
is the DC component of the steady-state initial input.
is the initial bias.
In the s-domain . Therefore, for the initial frequency, :
Examples

Three-Phase Matrix Converter with Venturini Modulation
Use Venturini modulation techniques to compute the duty cycles and logic statements of a three-phase matrix converter that drives a static load. The control subsystem implements three different modulation algorithms: Venturini modulation, third harmonic enhanced Venturini modulation, and third harmonic injection Venturini modulation with unity input displacement factor. The maximum voltage transfer ratio between input and output depends on the modulation technique and it is equal to either q=0.5 or q=0.866. The Scope blocks show the voltages and currents V_ABC, V_abc, I_ABC, and I_abc, where _UPPERCASE is used for inputs and _LOWERCASE for outputs.
Ports
Input
Output
Parameters
References
[1] Agarwal, A. and Lang, J. H. Foundations of Analog and Digital Electronic Circuits. New York: Elsevier, 2005.
Extended Capabilities
Version History
Introduced in R2018b