DC Current Controller
Discrete-time DC current PI control with integral anti-windup
Libraries:
Simscape /
Electrical /
Control /
General Machine Control
Description
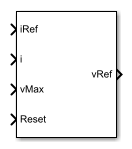
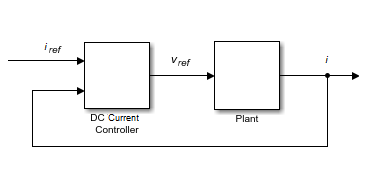
The DC Current Controller block implements a discrete-time proportional-integral (PI) DC voltage controller. The block can implement zero cancellation in the feedforward path. To avoid saturation of the integral gain, the block can implement anti-windup gain.
Equations
The equation that the DC Current Controller block uses to calculate the reference voltage is
where:
vref is the reference voltage.
Kp is the proportional gain.
Ki is the integral gain.
Ts is the sample time.
iref is the reference current.
i is the measured current.
The PI control calculation yields a zero in the closed-loop transfer function. To cancel the zero, the block uses this discrete-time zero-cancellation transfer function:
To avoid saturation of the integrator output, the block uses an anti-windup mechanism. The integrator gain is then equal to
where:
Kaw is the anti-windup gain.
vref_sat is the saturated reference voltage signal, which the block calculates as
where:
vref_unsat is the unsaturated reference voltage signal.
vmin is the lower limit for the output voltage. For positive voltage only, . For positive and negative voltage,
vmax is the upper limit for the output voltage.
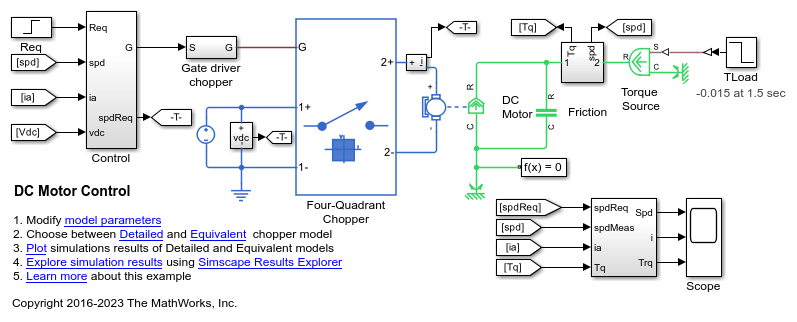
Examples
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2018a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)