Industrial Machinery
Simscape™ Multibody™ provides tools to model and analyze the dynamic behavior of industrial machinery. This includes studying the effects of different design decisions on machinery performance, such as efficiency, stability, and speed.
Featured Examples
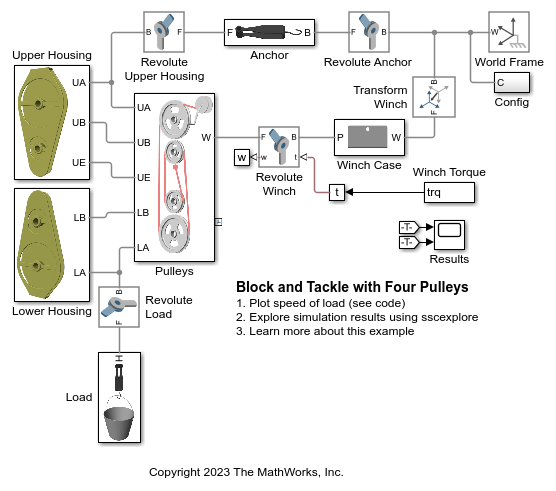
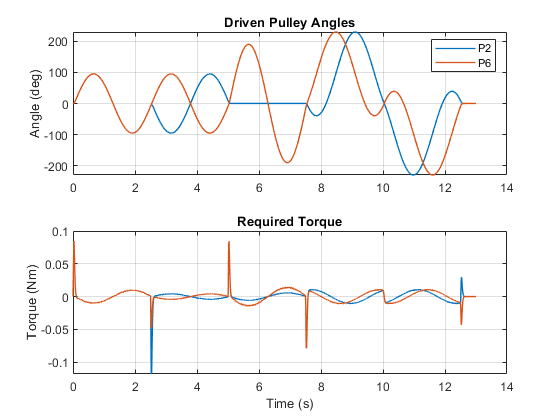
Block and Tackle with Four Pulleys
Models a block and tackle with four pulleys. Torque is applied to a winch which acts through the pulley mechanism to lift a load. Blocks from the Simscape™ Multibody™ Belts and Cables library are used to model the block and tackle.
Cable-Driven Cross Slide Table
Models an XY cross positioning table that uses a cable-driven mechanism. A single cable wraps around seven different pulleys and converts the rotational angle of the two input pulleys to the x-y position of the table.
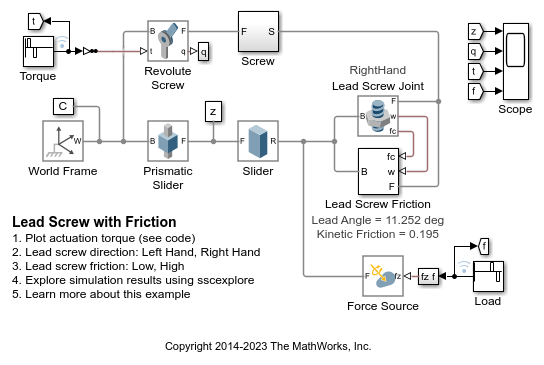
Lead Screw with Friction
Models a lead screw with friction. The constraint force in the lead screw is measured and used to calculate the friction torque within the lead screw. A continuous stick-slip friction model is used to determine the coefficient of friction based on the relative rotational speed of the two parts connected by the lead screw.
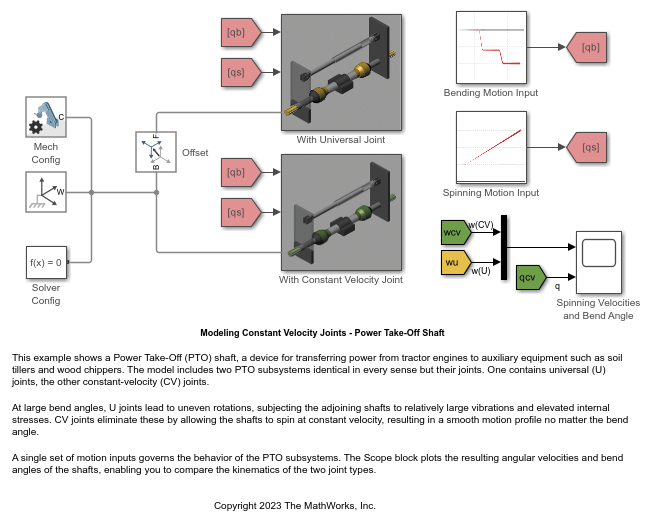
Modeling Constant Velocity Joints - Power Take-Off Shaft
A Power Take-Off (PTO) shaft, a device for transferring power from tractor engines to auxiliary equipment such as soil tillers and wood chippers. The model includes two PTO subsystems identical in every sense but their joints. One contains universal (U) joints, the other constant-velocity (CV) joints.

Modeling Self-Locking Worm and Gear Constraints - Worm Jack
Models a self-locking worm and gear constraint. The model shows a mechanical jack driven by a torque applied to a worm. The model includes two worm jack subsystems identical in every sense except for the value of the worm lead angle. Both subsystems have friction models applied to their Worm and Gear Constraint blocks.
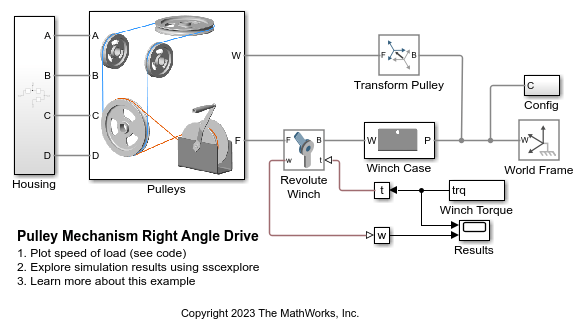
Pulley Mechanism Right Angle Drive
Models a pulley mechanism that takes a torque applied to a winch and transmits it to a pulley rotated at 90 degrees to that winch. This example uses blocks from the Simscape Multibody Belts and Cables library to model a pulley mechanism that is not all in a single plane.

Ratchet Lifter
Models a ratchet lifter and demonstrates how to use contact proxies for contact problems that involve complex geometries.

Rotational Interface: Electrically Operated Bread Slicer
This model simulates an electrically operated 1-DOF bread slicing mechanism. The electrical circuit and motor are modeled in Simscape™ while the bread slicing mechanism is modeled in Simscape Multibody™. The model uses a Rotational Multibody Interface block to connect the Simscape components to a Revolute Joint block in Multibody.

Translational Interface: Radial Engine with Gas Force Model
This model simulates a five cylinder radial engine. The pressure dynamics inside the cylinders are modeled using the Simscape™ Foundation Library gas and mechanical translational domains. The 3D mechanical components are modeled using Simscape Multibody™. See inside any of the blocks called "Force Model" to see how the 1D Simscape and 3D Multibody parts of the model are interfaced. The pressure model is an ideal pressure source which applies pressure based on the crank angle. This model can be replaced with a more realistic pressure model of the cylinder chamber. The cylinders fire in the sequence - A C E B D providing a power stroke every 144 deg of crank rotation.
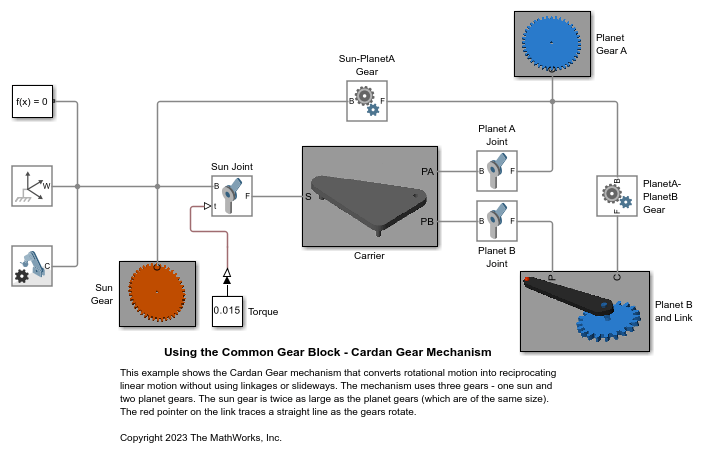
Using the Common Gear Block - Cardan Gear Mechanism
The Cardan Gear mechanism that converts rotational motion into reciprocating linear motion without using linkages or slideways. The mechanism uses three gears - one sun and two planet gears. The sun gear is twice as large as the planet gears (which are of the same size). The red pointer on the link traces a straight line as the gears rotate.
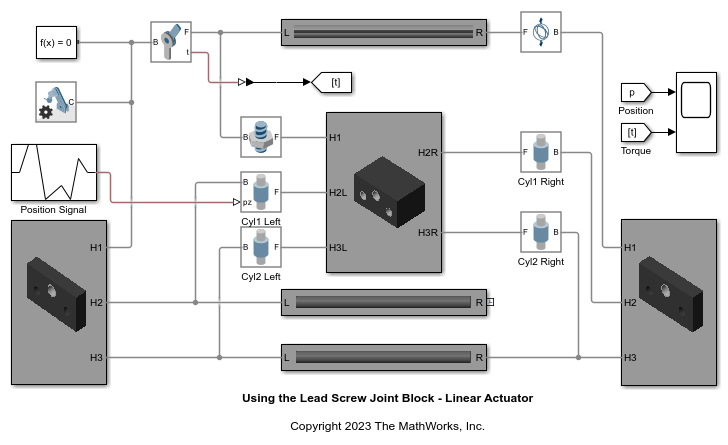
Using the Lead Screw Joint Block - Linear Actuator
Illustrates the use of the Lead Screw Joint block to model a linear actuator. The Lead Screw Joint block converts rotational motion at the Revolute Joint block to translational motion at the four Cylindrical Joint blocks. The translational motion is specified as a motion input to a cylindrical joint and the necessary actuator torque is automatically computed at the revolute joint.

Using the Point-On-Curve Block: Flapping Wing Mechanism
This model simulates a barrel cam based wing flapping mechanism. This is a one degree of freedom mechanism and the two wings flap in sync with each other. The Spline and Point On Curve blocks have been used to model the Barrel Cam mechanism that actuates the flapping motion of the wings.
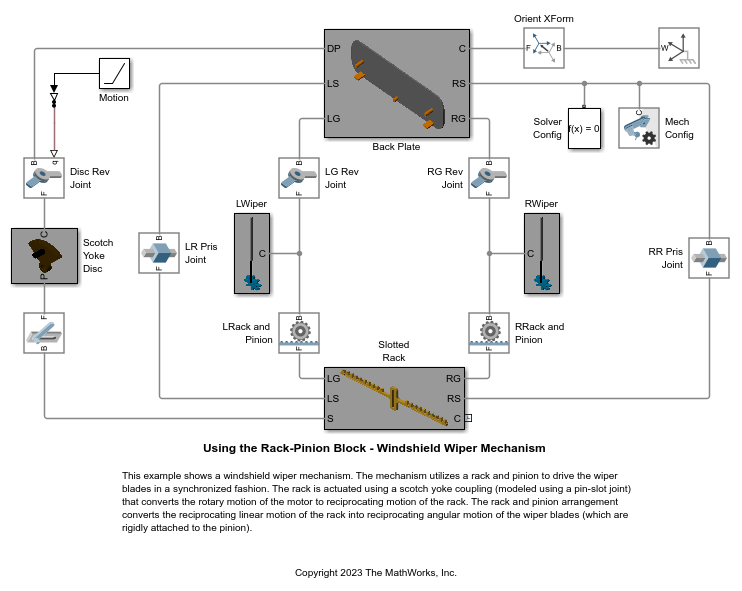
Using the Rack-Pinion Block - Windshield Wiper Mechanism
A windshield wiper mechanism. The mechanism utilizes a rack and pinion to drive the wiper blades in a synchronized fashion. The rack is actuated using a scotch yoke coupling (modeled using a pin-slot joint) that converts the rotary motion of the motor to reciprocating motion of the rack. The rack and pinion arrangement converts the reciprocating linear motion of the rack into reciprocating angular motion of the wiper blades (which are rigidly attached to the pinion).