Pulley
Wheel wrapped in a cord for the transmission of torque and motion

Libraries:
Simscape /
Multibody /
Belts and Cables
Description
The Pulley block represents a grooved or toothed wheel wrapped in a cord, an arrangement used frequently in the transmission of torque and motion in part for the mechanical advantage that it can provide. The pulley (or sprocket if toothed) is ideal: massless and frictionless, with zero slip permitted between its surface and the surrounding cord, itself idealized as taut and inextensible. Use the pulley singly or as part of a compound pulley system such as the block and tackle of a hoist or the timing belt of a car engine.
The pulley has one local reference frame (frame port R) and two cord tangency points (belt-cable ports A and B). The reference frame is placed with its origin at the center of the pulley and its z-axis along the rotation axis of the same. The cord tangency points coincide with the locations at which the cord meets or separates from the pulley. These locations can change during simulation. The belt or cable wraps around the pulley from port A to port B so as to trace a counterclockwise arc about the z-axis.

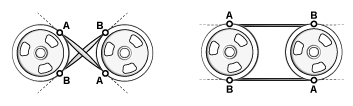
In a closed-loop system of two pulleys—such as a belt drive—the connections of the belt-cable ports determine whether the cord geometry is crossed or open. As shown in the following schematic, in a system of pulleys in which the z-axes are aligned in parallel, if port A of one connects to port A of another, then the cord is crossed; if port A of one connects to port B of another, then the cord is open. The effect is the same if instead of switching the port connections, one of the frames is flipped so that the z-axes of the pulleys are anti-parallel.
The degrees of freedom of the pulley depend entirely on the joints and constraints (if any) to which it connects. Attaching a pulley to a case by means of a revolute joint imparts to the pulley one rotational degree of freedom relative to the case; one is then free to rotate relative to the other. Fixing the pulley to another pulley, by means of a direct connection, a rigid transform, or a weld joint, constrains the two so that if one rotates, then so must the other.
By default, the cord can enter and exit a pulley at an angle to its center plane (θ in the figure). This angle can vary during simulation—for example, due to translation of the pulley on a prismatic joint. While the contact point is always in the center plane of the pulley, the pulley can move when mounted on a joint. The cord can also be constrained to enter and exit the pulley in its center plane. Whether this constraint is enforced depends on the settings of the Belt-Cable Properties block.

The pulleys must remain at distances that preserve the natural length of the cord. This length is computed from the initial placements of the pulleys and it is fixed: the cord can neither stretch nor slacken during simulation. The length calculations include the arc lengths of the cord about the pulleys. The contact between them is idealized as slipless, with a contact point on the cord always moving at the same instantaneous velocity as its counterpart on the pulley.
Note that the frame and belt-cable ports belong to different multibody domains. As a rule, ports connect only to like ports—frame ports to other frame ports, belt-cable ports to other belt-cable ports. The belt-cable domain has the special requirement that each network or belt-cable connection lines connect to one (and no more than one) Belt-Cable Properties block. It is through that block that the visualization of the cord is configured and the length of the same is (on diagram update) computed.
The visualization of the cord is in the form of a pitch line. The cord meets and separates from the pulley tangent to its circumference. The arc of contact between the cord and the pulley is called the pitch arc. The pitch line of the cord is the sum of the line segments between different pulleys and of their respective pitch arcs. The line segments between the pulleys are shown as rectilinear, consistent with the constraint that no slackening is allowed to take place.
Combine the Pulley block with the Belt-Cable Spool block to retrieve from a winch, and to return to it, additional lengths of cord. An example application is the lowering and raising of the hook block of a tower crane. Use the Belt-Cable End block to define an end point to the cord. The end point contains a frame for connection to a load, fixture, or other part of a multibody model.
Examples
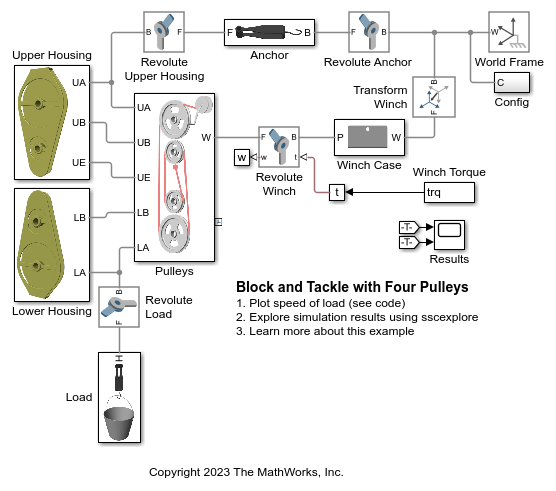
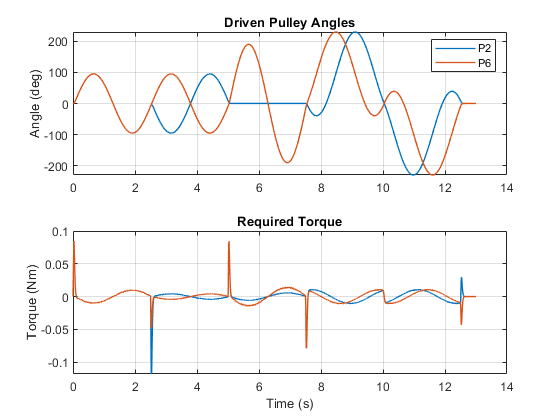
Block and Tackle with Four Pulleys
Models a block and tackle with four pulleys. Torque is applied to a winch which acts through the pulley mechanism to lift a load. Blocks from the Simscape™ Multibody™ Belts and Cables library are used to model the block and tackle.
Cable-Driven Cross Slide Table
Models an XY cross positioning table that uses a cable-driven mechanism. A single cable wraps around seven different pulleys and converts the rotational angle of the two input pulleys to the x-y position of the table.

Cable Robot
Models a cable robot. The robot comprises 8 independent belt-cable circuits which control the 6 degrees-of-freedom of the mover. A ball is dropped from a fixed height down the center axis of the mechanism. The mover initially starts directly below the ball and the contact is modeled between the mover and the ball such that the ball bounces elastically when striking the mover. The objective of the mover is to perform increasingly complex maneuvers between successive bounces of the ball. The mover is motion actuated from which the necessary cable, pulley, and motor spool kinematics are computed.
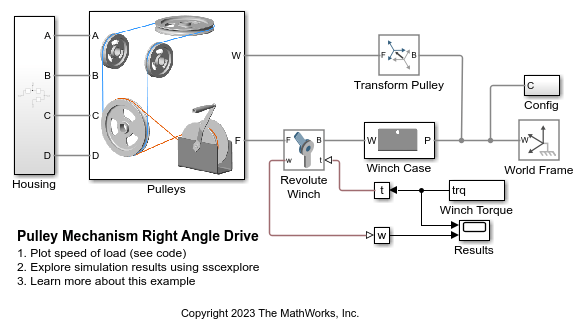
Pulley Mechanism Right Angle Drive
Models a pulley mechanism that takes a torque applied to a winch and transmits it to a pulley rotated at 90 degrees to that winch. This example uses blocks from the Simscape Multibody Belts and Cables library to model a pulley mechanism that is not all in a single plane.

Cable Driven Space Manipulator
Models a cable driven space manipulator. The manipulator comprises of 2 links connected via a system of revolute joints. Each link consists of belt-cable circuits which drive the movements of the manipulator. It also consists of a spring-damper system which provides different stiffness requirements. A space application is shown in this example where the objective of the manipulators is to capture a small satellite. The manipulators start from folded states and then perform necessary maneuvers to extend and reach the desired position. The pulleys are motion actuated from which necessary belt-cable kinematics are computed.

Tower Crane with Trolley and Hoist
Models a tower crane with a trolley and a hoist. The hoist can raise and lower a load, and the trolley moves the load towards and away from the tower. Blocks from the belts and cables library are used to model the pulleys that control lifting the load and moving the trolley.

Elevator
Models an elevator system in Simscape™ Multibody™. The system is comprised of belt-cable pulley circuits which control the movement of the elevator and the door mechanism. The cable is approximated to be extensible by using high stiffness springs between the belt cable ends and the elevator. The motor pulley is motion actuated based on the necessary elevator kinematics computed from the Floor Number inputs. Effects of people entering and leaving the elevator are modeled using general variable mass blocks.
Ports
Frame
Belt-Cable
Parameters
Distance from the center of the pulley to the centerline of the cord at any point of contact. In compound pulley systems, the differences in pitch radii often determine the ratio at which speed is reduced or torque is augmented.
Lower Bound — Specify the lower bound on the initial wrap angle of the pulley. The wrap angle at the beginning of simulation is greater than or equal to this specified value.
Selection of kinematic variables to sense. Select a check box to expose a physical signal port for the corresponding variable. The variables available for sensing are:
Wrap Angle — Angle from the point of contact associated with port A to that associated with port B. This angle is measured in the center (xy) plane of the pulley. It is always equal to or greater than zero, with its value increasing by
2πfor each revolution made counterclockwise about the local z-axis. Use port qwrp for this measurement.The figure shows the wrap angle between the contact points (A and B of a pulley). The local reference frame indicates the x-axis (horizontal) and the y-axis (vertical) of the pulley.

Pulley Angle A — Angle, measured in the xy plane of the reference frame, from the local x-axis to the line between the frame origin and point of contact A.
If the point of contact is above the xz-plane (in the +y-region of the reference frame), the angle is positive. If the point of contact is below the xz-plane, the angle is negative. The angle is zero when the point of contact happens to be exactly in the xz-plane.
The angle is not modular. Rather than be constrained to a 360-degree range—snapping back to the beginning of the range after completing a turn—the measured value changes continuously with repeated turns. Every turn that the drum makes adds (or subtracts) 2π to the measurement.
Use port qpa for this measurement.
Pulley Angles A and B

Pulley Angle B — Angle, measured in the xy plane of the reference frame, from the local x-axis to the line between the frame origin and point of contact B.
If the point of contact is above the xz-plane (in the +y-region of the reference frame), the angle is positive. If the point of contact is below the xz-plane, the angle is negative. The angle is zero when the point of contact happens to be exactly in the xz-plane.
The angle is not modular. Rather than be constrained to a 360-degree range—snapping back to the beginning of the range after completing a turn—the measured value changes continuously with repeated turns. Every turn that the drum makes adds (or subtracts) 2π to the measurement.
Use port qpb for this measurement.
Fleet Angle A — Angle from the xy-plane of the reference frame to the cord at point of contact A. The xy-plane is the same as the center plane of the drum.
If the cord approaches the point of contact from above the xy-plane (in the +z region of the reference frame), the angle is positive. If the cord approaches from below, the angle is negative. The angle is zero when the cord approaches the point of contact in the center plane of the drum.
The angle is modular, which is to say that its value is bound—here, between -π/2 to +π/2. This range is open. The measured value can vary between -π/2 and +π/2, but it cannot hit either limit.
Note that if the Drum Belt-Cable Alignment parameter of the Belt-Cable Properties block is set to
Monitored Planar, the pulley assembly is required to be planar, and the fleet angle is therefore always zero. To model a nonplanar assembly, use the default setting for that parameter:Unrestricted.Use port qfa for this measurement.
Fleet Angle A

Fleet Angle B — Angle from the xy-plane of the reference frame to the cord at point of contact B. The xy-plane is the same as the center plane of the drum.
If the cord approaches the point of contact from above the xy-plane (in the +z region of the reference frame), the angle is positive. If the cord approaches from below, the angle is negative. The angle is zero when the cord approaches the point of contact in the center plane of the drum.
The angle is modular, which is to say that its value is bound—here, between -π/2 to +π/2. This range is open. The measured value can vary between -π/2 and +π/2, but it cannot hit either limit.
Note that if the Drum Belt-Cable Alignment parameter of the Belt-Cable Properties block is set to
Monitored Planar, the pulley assembly is required to be planar, and the fleet angle is therefore always zero. To model a nonplanar assembly, use the default setting for that parameter:Unrestricted.Use port qfb for this measurement.
Extended Capabilities
Version History
Introduced in R2018a