Bodies
Model the bodies of an articulated mechanical assembly. Bodies can be rigid or flexible, the latter being free to deform when acted upon by a force or torque. All bodies are characterized by their physical properties, among them geometry, inertia, and color. Flexible bodies have the additional properties of stiffness, damping, and discretization level.
Rigid bodies are based on the various solid blocks, the File Solid block, or, in special cases, their equivalents of variable mass and geometry. You can find the latter in the Body Elements > Variable Mass library. Use the File Solid block to import a body from a 3-D part file. Flexible bodies are based on the blocks in the Body Elements > Flexible Bodies library. These include flexible beam blocks, representing slender bodies with specified cross-sections, and the Reduced Order Flexible Solid block, which captures the mechanical behavior of a deformable body through a reduced-order model.
A single Brick Solid, File Solid, or General Flexible Beam block may suffice to completely model a body. More often, several are required. The body is then a composite of simpler body elements fixed to one another. Frame connection lines between the blocks establish the necessary rigid connections between the body elements. Rigid Transform blocks, normally inserted in the connection lines, provide the relative positions and orientations required for proper assembly.
Apps
| Flexible Body Model Builder | Generate reduced-order model data for flexible bodies (Since R2023a) |
Classes
Simscape Blocks
Functions
Topics
Bodies
- Bodies Workflow
Bodies, the core constituents of a multibody model, comprise body elements, each in turn comprising frames and attributes. Modeling a body is more than adding a block to a model. Here are some general steps to keep in mind when modeling one. - Overview of Flexible Beams
Flexible beams are slender bodies with constant cross-sections that can have linear elastic deformations. Use them when the rigid-body approximation is not valid. Here are some background information to keep in mind when modeling flexible beams. - Compounding Body Elements
A typical body is a collection of solids and other body elements. In this sense, it is a compound unit. Learn how you can use compounding to create complex geometries and inertias from simpler ones. - Model an Excavator Dipper Arm as a Flexible Body
Use the Reduced Order Flexible Solid block to model a deformable body of arbitrary geometry. Start with the CAD geometry of the body, produce a finite-element mesh, and generate reduced-order data to use with the block. - Modeling Bodies
Bodies are representations that you create of physical parts—gears, pistons, levers—for later assembly into multibody systems, a piston engine serving as an example. Here is an introduction to bodies as well as the blocks and tools commonly used to represent one in a model.
Geometry
- Modeling Extrusions and Revolutions
General Extruded Solid and Revolved Solid blocks are the most versatile of the preset solid shapes. Their cross-sections are custom and set by coordinate matrices that you specify. Here is an introduction to both the shapes and the cross-sections that define them. - Representing Solid Geometry
Geometry is a key attribute of solids and of the bodies they comprise. You can specify the shape and size of a solid using the Solid block. Here is an introduction to the types of shapes that you can specify (or import) using this block.
Inertia
- Representing Solid Inertia
Inertia quantifies the resistance of a body to changes in motion and is among the most important attributes in a model. Here is an introduction to the types of inertias that you can represent in a model as well as the blocks and parameterizations that you can use to do so. - Specifying Custom Inertias
"Inertia" is a general term often used to mean mass, center of mass, the moments of inertia, and the products of inertia. Learn more about these inertia parameters and how they are defined in the Simscape™ Multibody™ environment. - Specifying Variable Inertias
Not all inertias remain constant during simulation. Some can vary and it is often their changing parameters that most matter in a model. Learn more about variable inertias and how you can specify their parameters in a model.
Frames
- Creating Connection Frames
Often, you must create new frames for use in joint and constraint connections. Learn how you can create such frames and how joints and constraints affect their placements in a body. - Creating Custom Solid Frames
All solids have a local reference frame but you can create other, custom, frames, for connection in a model. Learn how you can perform this task using the frame creation panel of the Solid block. - Working with Frames
Frames are axis triads that encode the position and orientation of body elements in a body. Learn about frames as a means to connect body elements and about rigid transforms as a means to offset those elements.
Visualization
- Manipulate the Color of a Solid
Color helps to differentiate bodies and contributes to the effectiveness of a multibody visualization. Learn about the color parameters that you can specify and their impact on the appearance of your bodies. - Visualize a Model and Its Components
Visualization is not only a central part of a multibody simulation, but also an essential tool in modeling bodies and verifying their shapes, sizes, frame placements, and colors. Here is an overview of the visualization utilities available in the Simscape Multibody environment and the roles they play in your modeling workflow.
Featured Examples
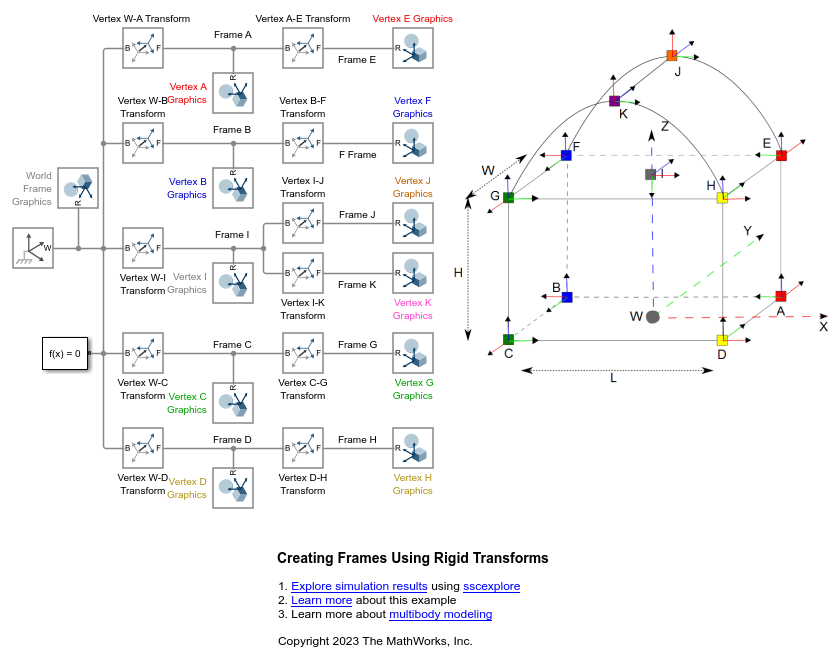
Creating Frames Using Rigid Transforms
The correspondence of coordinate frames to connection lines and frame ports. It highlights the Rigid Transform block as the fundamental method to rigidly relate nonidentical frames. The network reference frame is the world frame, located at the center of the bottom face of the cube. The other frames are the frames at the eight vertices of the cube, one at the center of the top face, and two on the upper curved section.
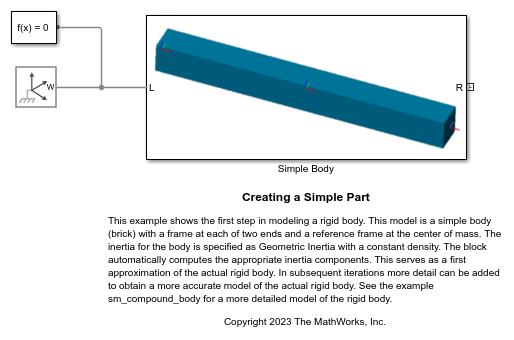
Creating a Simple Body
The first step in modeling a rigid body. This model is a simple body (brick) with a frame at each of two ends and a reference frame at the center of mass. The inertia for the body is specified as Geometric Inertia with a constant density. The block automatically computes the appropriate inertia components. This serves as a first approximation of the actual rigid body. In subsequent iterations more detail can be added to obtain a more accurate model of the actual rigid body.
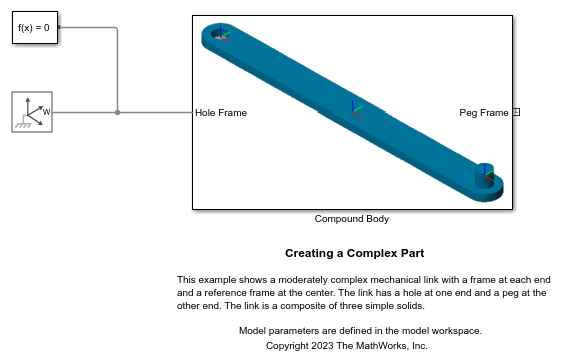
Creating a Complex Part
A moderately complex mechanical link with a frame at each end and a reference frame at the center. The link has a hole at one end and a peg at the other end. The link is a composite of three simple solids.
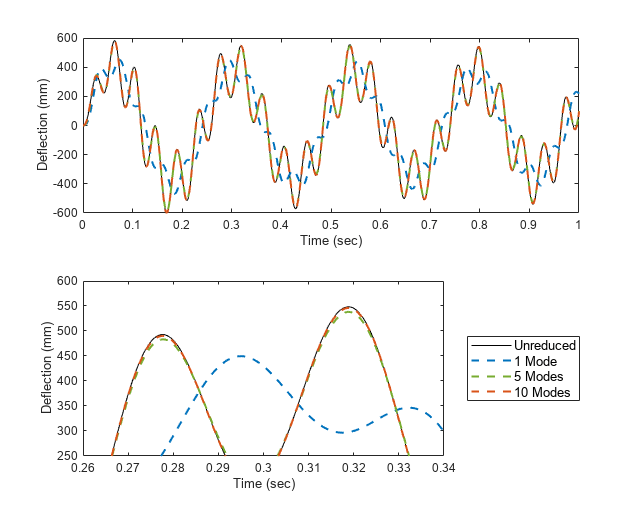
Using Modal Reduction in Flexible Bodies to Improve Simulation Performance
Use modal reduction for performance acceleration in models with flexible bodies. The model in this example uses a rectangular beam for simplicity, but you can apply modal reduction to all flexible body blocks. By only retaining the lowest-frequency modes of vibration of flexible bodies in your multibody system, you can speed up simulation while maintaining sufficient fidelity.

Using the Reduced Order Flexible Solid Block - Flexible Dipper Arm
Model a flexible dipper arm, such as the arm for an excavator or a backhoe, by using the Reduced Order Flexible Solid block. This block captures the mechanical behavior of a deformable body through reduced-order stiffness and mass matrices that are associated with interface frame locations. In this example, the Partial Differential Equation Toolbox™ is used to create the reduced-order model.

Create a Simple Pendulum in MATLAB
Constructs a simple pendulum in MATLAB®. It demonstrates various classes under the simscape.multibody.* namespace to build a simple multibody system in MATLAB.