Specify Individual Block Linearization
Some Simulink® blocks, including those with sharp discontinuities, can produce poor linearization results. For example, when your model operates in a region away from the point of discontinuity, the linearization of the block is zero. Typically, you must specify custom linearizations for such blocks or subsystems using one of the following:
MATLAB® Expression
Configuration Function
Using these methods, you can specify the block linearization as:
A linear model in the form of a D-matrix.
A Control System Toolbox™ model object.
An uncertain state-space object or an uncertain real object (requires Robust Control Toolbox™ software).
Specify Block Linearization Using MATLAB Expression
This example shows how to specify the linearization of any block, subsystem, or model reference without having to replace this block in your Simulink model.
Open the Linearization Manager. In the Simulink model window, in the Apps gallery, click Linearization Manager.
In the model, select the block for which you want to specify the linearization.
On the Linearization tab, click Specify Block Linearization.
In the Block Linearization Specification dialog box, in the Specify block linearization using one of the following list, select MATLAB Expression.
In the text field, enter an expression that specifies the linearization.
For example, specify the linearization as an integrator with a gain of k, G(s) = k/s.
In state-space form, this transfer function corresponds to
ss(0,1,k,0).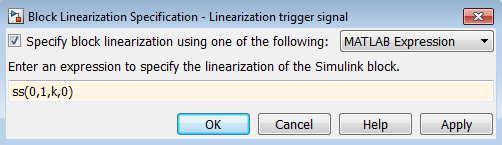
Click OK.
Linearize the model.
Specify D-Matrix System for Block Linearization Using Function
This example shows how to specify custom linearization for a saturation block using a function.
Open the Simulink® model.
mdl = 'configSatBlockFcn';
open_system(mdl)
In this model, the limits of the saturation block are –satlimit and satlimit.
Define the saturation limit, which is a parameter required by the linearization function of the Saturation block.
satlimit = 10;
Linearize the model at the model operating point using the linear analysis points defined in the model. Doing so returns the linearization of the saturation block.
io = getlinio(mdl); linsys = linearize(mdl,io)
linsys =
D =
Constant
Saturation 0.5
Static gain.
Model Properties
At the model operating point, the input to the saturation block is 10. This value is on the saturation boundary. At this value, the saturation block linearizes to 1.
Suppose that you want the block to linearize to a transitional value of 0.5 when the input falls on the saturation boundary. Write a function that defines the saturation block linearization to behave this way. For this example, use the configuration function in mySaturationLinearizationFcn.m.
function blocklin = mySaturationLinearizationFcn(BlockData) % This function customizes the linearization of a saturation block. The % linearization of the block is as follows % BLOCKLIN = 0 when |U| > saturation limit % BLOCKLIN = 1 when |U| < saturation limit % BLOCKLIN = 0.5 when U = saturation limit % Get the saturation limit specified in the parameters of the block. satlimit = BlockData.Parameters.Value; % Compute the linearization based on the input signal level to the block. if abs(BlockData.Inputs.Values) > satlimit blocklin = 0; elseif abs(BlockData.Inputs.Values) < satlimit blocklin = 1; else blocklin = 0.5; end
This configuration function defines the saturation block linearization based on the level of the block input signal. For input values outside the saturation limits, the block linearizes to zero. Inside the limits, the block linearizes to 1. For boundary values, the block linearizes to the interpolated value of 0.5. The input to the function, BlockData, is a structure that the software creates automatically when you configure the linearization of the Saturation block to use the function. The configuration function reads the saturation limits from that data structure.
The input to the function, BlockData, is a structure that the software creates automatically each time it linearizes the block. When you specify a block linearization configuration function, the software automatically passes BlockData to the function. If your configuration function requires additional parameters, you can configure the block to set those parameters in the BlockData.Parameters field.
Specify mySaturationLinearizationFcn as the linearization for the Controller block.
In the Simulink model, right-click the Saturation block, and select Linear Analysis > Specify Selected Block Linearization.
In the Block Linearization Specification dialog box, select Specify block linearization using one of the following.
In the drop-down list, select
Configuration Function.In the text box, enter the function name
mySaturationLinearizationFcn.Specify the saturation limit as a parameter for the function. In the Parameter Value column, enter the variable name
satlimit.In the Parameter Name column, enter the corresponding descriptive name
SaturationLimit.Click OK.

Alternatively, you can define the configuration function programmatically.
satblk = 'configSatBlockFcn/Saturation'; set_param(satblk,'SCDEnableBlockLinearizationSpecification','on') rep = struct('Specification','mySaturationLinearizationFcn',... 'Type','Function',... 'ParameterNames','SaturationLimit',... 'ParameterValues','satlimit'); set_param(satblk,'SCDBlockLinearizationSpecification',rep)
Linearize the model again. Now, the linearization uses the custom linearization of the saturation block.
linsys_cust = linearize(mdl,io)
linsys_cust =
D =
Constant
Saturation 0.5
Static gain.
Model Properties
At the model operating point, the input to the saturation block is 10. Therefore, the block linearizes to 0.5, the linearization value specified in the configuration function.