Simulated Response Does Not Match PID Tuner Response
When you run your Simulink® model using the PID gains computed by PID Tuner, the simulation output differs from the PID Tuner response plot.
There are several reasons why the simulated model can differ from the PID Tuner response plot. If the simulated result meets your design requirements (despite differing from the PID Tuner response), you do not need to refine the design further. If the simulated result does not meet your design requirements, see Cannot Find Acceptable PID Design in Simulated Model.
Some causes for a difference between the simulated and PID Tuner responses include:
The reference signals or disturbance signals in your Simulink model differ from the step signals that PID Tuner uses. If you need step signals to evaluate the performance of the PID controller in your model, change the reference signals in your model to step signals.
The structure of your model differs from the loop structure that PID Tuner designs for. PID Tuner assumes the loop configuration shown in the following figure.
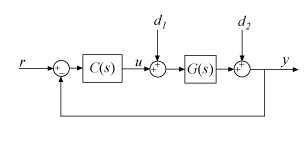
As the figure illustrates, PID Tuner designs for a PID controller in the feedforward path of a unity-gain feedback loop. If your Simulink model differs from this structure, or injects a disturbance signal in a different location, your simulated response differs from the PID Tuner response.
You have enabled nonlinear features in the PID Controller block in your model, such as saturation limits or anti-windup circuitry. PID Tuner ignores nonlinear settings in the PID Controller block, which can cause PID Tuner to give a different response from the simulation.
Your Simulink model has strong nonlinearities in the plant that make the linearization invalid over the full operating range of the simulation.
You selected an operating point using PID Tuner that is different from the operating point saved in the model. In this case, PID Tuner has designed a controller for a different operating point than the operating point that begins the simulation. Simulate your model using the PID Tuner operating point by initializing your Simulink model with this operating point. See Simulate Simulink Model at Specific Operating Point.
See Also
PID Controller | Discrete PID Controller | PID Controller (2DOF) | Discrete PID Controller (2DOF)