sim3d.sensors.RaytraceSensor
Description
Use the sim3d.sensors.RaytraceSensor object to implement ray tracing in the
scene. You can configure the ray origins, directions, and lengths to adjust the ray trace
sensor pattern for your scene and test scenario. After you create a
sim3d.sensors.RaytraceSensor object, you can modify aspects of the actor object by setting
property values.
Creation
Syntax
Description
raytraceSensor = sim3d.sensors.RaytraceSensor()sim3d.sensors.RaytraceSensor object in the 3D environment.
raytraceSensor = sim3d.sensors.RaytraceSensor(Name=Value)NumberOfBounces to 3.
Name-Value Arguments
Output Arguments
Properties
Object Functions
read | Return target data using ray tracing |
Examples
Create a raytrace sensor in the 3D environment using the sim3d.sensors.RaytraceSensor object. You can adjust the ray trace sensor pattern for your scene and test scenario. Use the read function to extract target data from the 3D environment.
Create a 3D environment and set up communication with the Unreal Engine® simulation environment using the output function OutputImpl and the update function UpdateImpl. The sim3d.World object can send and receive data about the 3D environment to and from the Unreal Engine at each simulation step using output and update functions, respectively. Before the Unreal Engine simulates, MATLAB® calls the output function and sends data to the Unreal Engine. Then, the Unreal Engine executes at each time step and sends data to MATLAB in the update function. You can use the update function to read this data or change values after each simulation step.
world = sim3d.World(Output=@OutputImpl,Update=@UpdateImpl);
Create a box actor in the 3D environment using the sim3d.Actor object and add the box to the world.
cube = sim3d.Actor( ... ActorName="Cube", ... Mobility='Movable'); createShape(cube,"box"); add(world,cube);
Create a grid of coordinates using the meshgrid function. Use the two 2D grids, Y and Z to generate directions. The directions matrix specifies the direction for each ray.
ys = linspace(-0.1,0.1,4); zs = linspace(-0.1,0.1,4); [Y,Z] = meshgrid(ys,zs); directions = [ones(16, 1) Y(:) Z(:)];
Create a raytrace sensor object using the sim3d.sensors.RaytraceSensor object and set the location of the sensor. Add the sensor to the world.
raytracesensor = sim3d.sensors.RaytraceSensor( ... ActorName="Raytracer", ... RayOrigins = zeros(16, 3), ... RayDirections = directions, ... RayLengths = 1000 .* ones(16, 1), ... VisualizeTraceLines = true); raytracesensor.Translation = [-3 0 0]; add(world,raytracesensor);
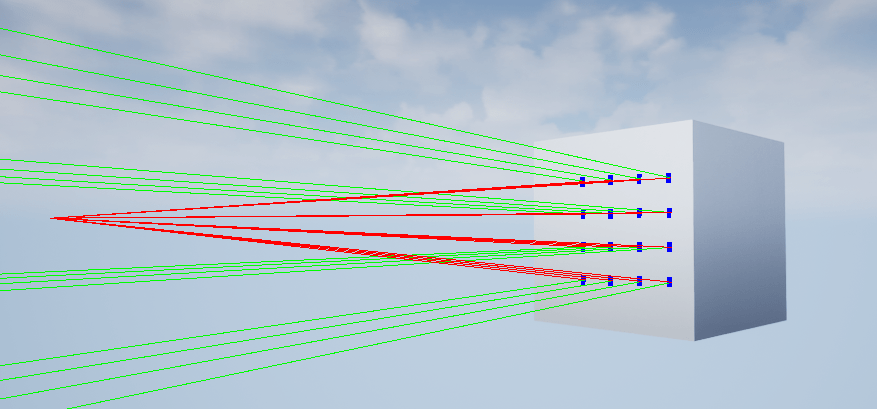
Set the Simulation 3D Viewer window point of view using the createViewpoint function and setView function. Run the co-simulation. You can visualize the rays from the sensor in the simulation. The red rays are the rays generated from the sensor, the green rays are the rays reflected from the target, and the blue box displays the area of intersection on the target surface.
view = createViewpoint(world); view.Translation = [-4 2 0]; view.Rotation = [0 0 -0.2*pi]; setView(world,view); sampletime = 0.5; stoptime = 10; run(world,sampletime,stoptime);
Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 1 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0 Valid Hits: 0
Output Function
The output function sends data about the actor to the Unreal Engine environment at each simulation step. For this example, the function rotates the Cube about its Z-axis by updating the Rotation property of the Cube at each simulation step.
function OutputImpl(world) world.Actors.Cube.Rotation(3) = world.Actors.Cube.Rotation(3) ... + 0.01; end
Update Function
The update function reads data from the Unreal Engine environment at each simulation step. For this example, the update function uses the read function of the sim3d.sensors.RaytraceSensor object to detect valid hits from the raytrace sensor in the Unreal Engine environment.
function UpdateImpl(world) [~,~,~,~,validHits] = read(world.Actors.Raytracer); fprintf("Valid Hits: %d\n", validHits); end