Coulomb and Viscous Friction
Model discontinuity at zero, with linear gain elsewhere
Libraries:
Simulink /
Discontinuities
HDL Coder /
Discontinuities
Description
The Coulomb and Viscous Friction block models Coulomb (static) and viscous (dynamic) friction. The block models a discontinuity at zero and a linear gain otherwise.
The block output matches the MATLAB® result for:
y = sign(x) .* (Gain .* abs(x) + Offset)
where y is the output, x is
the input, Gain is the signal gain for nonzero
input values, and Offset is the Coulomb friction.
The block accepts one input and generates one output. The input can be a scalar, vector, or matrix with real and complex elements.
For a scalar input,
GainandOffsetcan have dimensions that differ from the input. The output is a scalar, vector, or matrix depending on the dimensions ofGainandOffset.For a vector or matrix input,
GainandOffsetmust be scalar or have the same dimensions as the input. The output is a vector or matrix of the same dimensions as the input.
Examples
This example shows a model that provides a scalar input to a Coulomb & Viscous Friction block. The Coulomb & Viscous Friction uses scalar expansion to produce a vector output.
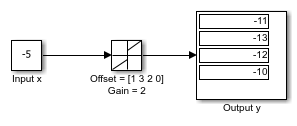
Double click the Coulomb & Viscous Friction block to see the parameters. The Coefficient of viscous friction (Gain) parameter has a scalar value of 2, and the Coulomb friction value (Offset) parameter has a vector value of [1 3 2 0]. Because the dimensions of the input and the dimensions of the offset are different, the block uses element-wise scalar expansion to compute the output.
Each output is calculated using this formula.

For example, this equation shows the calculation for the first offset, 1.


No scalar expansion is necessary if the input and offset have the same dimensions.
Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|