idct
Inverse discrete cosine transform
Description
y = idct(___,Type=dcttype)
Examples
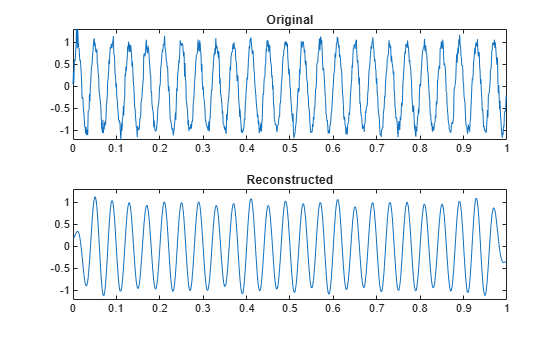
Generate a signal that consists of a 25 Hz sinusoid sampled at 1000 Hz for 1 second. The sinusoid is embedded in white Gaussian noise with variance 0.01.
rng('default')
Fs = 1000;
t = 0:1/Fs:1-1/Fs;
x = sin(2*pi*25*t) + randn(size(t))/10;Compute the discrete cosine transform of the sequence. Determine how many of the 1000 DCT coefficients are significant. Choose 1 as the threshold for significance.
y = dct(x); sigcoeff = abs(y) >= 1; howmany = sum(sigcoeff)
howmany = 17
Reconstruct the signal using only the significant components.
y(~sigcoeff) = 0; z = idct(y);
Plot the original and reconstructed signals.
subplot(2,1,1) plot(t,x) yl = ylim; title('Original') subplot(2,1,2) plot(t,z) ylim(yl) title('Reconstructed')
Verify that the different variants of the discrete cosine transform are orthogonal, using a random signal as a benchmark.
Start by generating the signal.
s = randn(1000,1);
Verify that DCT-1 and DCT-4 are their own inverses.
dct1 = dct(s,'Type',1); idt1 = idct(s,'Type',1); max(abs(dct1-idt1))
ans = 1.3323e-15
dct4 = dct(s,'Type',4); idt4 = idct(s,'Type',4); max(abs(dct4-idt4))
ans = 1.3323e-15
Verify that DCT-2 and DCT-3 are inverses of each other.
dct2 = dct(s,'Type',2); idt2 = idct(s,'Type',3); max(abs(dct2-idt2))
ans = 4.4409e-16
dct3 = dct(s,'Type',3); idt3 = idct(s,'Type',2); max(abs(dct3-idt3))
ans = 1.1102e-15
Input Arguments
Output Arguments
More About
References
[1] Jain, A. K. Fundamentals of Digital Image Processing. Englewood Cliffs, NJ: Prentice-Hall, 1989.
[2] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
[3] Pennebaker, W. B., and J. L. Mitchell. JPEG Still Image Data Compression Standard. New York: Van Nostrand Reinhold, 1993.
Extended Capabilities
Version History
Introduced before R2006a