serdes.DFECDR
Decision feedback equalizer (DFE) with clock and data recovery (CDR)
Description
The serdes.DFECDR
System object™ adaptively processes a sample-by-sample input signal or analytically processes
an impulse response vector input signal to remove distortions at post-cursor taps.
The DFE modifies baseband signals to minimize the intersymbol interference (ISI) at the clock sampling times. The DFE samples data at each clock sample time and adjusts the amplitude of the waveform by a correction voltage.
For impulse response processing, the hula-hoop algorithm is used to find the clock sampling locations. The zero-forcing algorithm is then used to determine the N correction factors necessary to have no ISI at the N subsequent sampling locations, where N is the number of DFE taps.
For sample-by-sample processing, the clock recovery is accomplished by a first order phase tracking model. The bang-bang phase detector utilizes the unequalized edge samples and equalized data samples to determine the optimum sampling location. The DFE correction voltage for the N-th tap is adaptively found by finding a voltage that compensates for any correlation between two data samples spaced by N symbol times. This requires a data pattern that is uncorrelated with the channel ISI for correct adaptive behavior.
To equalize the input signal:
Create the
serdes.DFECDRobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
dfecdr = serdes.DFECDR
dfecdr = serdes.DFECDR(Name,Value)
Example: dfecdr = serdes.DFECDR('Mode',1) returns a DFECDR object
that applies specified DFE tap weights to input waveform.
Properties
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
This example shows how to process impulse response of a channel using serdes.DFECDR System object™.
Use a symbol time of 100 ps. There are 16 samples per symbol. The channel has 14 dB loss.
SymbolTime = 100e-12; SamplesPerSymbol = 16; dbloss = 14; NumberOfDFETaps = 2;
Calculate the sample interval.
dt = SymbolTime/SamplesPerSymbol;
Create the DFECDR object. The object adaptively applies optimum DFE tap weights to input impulse response.
DFE1 = serdes.DFECDR('SymbolTime',SymbolTime,'SampleInterval',dt,... 'Mode',2,'WaveType','Impulse','TapWeights',zeros(NumberOfDFETaps,1));
Create the channel impulse response.
channel = serdes.ChannelLoss('Loss',dbloss,'dt',dt,... 'TargetFrequency',1/SymbolTime/2); impulseIn = channel.impulse;
Process the impulse response with DFE.
[impulseOut,TapWeights] = DFE1(impulseIn);
Convert the impulse response to a pulse, a waveform and an eye diagram for visualization.
ord = 6; dataPattern = prbs(ord,2^ord-1)-0.5; pulseIn = impulse2pulse(impulseIn,SamplesPerSymbol,dt); waveIn = pulse2wave(pulseIn,dataPattern,SamplesPerSymbol); eyeIn = reshape(waveIn,SamplesPerSymbol,[]); pulseOut = impulse2pulse(impulseOut,SamplesPerSymbol,dt); waveOut = pulse2wave(pulseOut,dataPattern,SamplesPerSymbol); eyeOut = reshape(waveOut,SamplesPerSymbol,[]);
Create the time vectors.
t = dt*(0:length(pulseOut)-1)/SymbolTime; teye = t(1:SamplesPerSymbol); t2 = dt*(0:length(waveOut)-1)/SymbolTime;
Plot the resulting waveforms.
figure plot(t,pulseIn,t,pulseOut) legend('Input','Output') title('Pulse Response Comparison') xlabel('SymbolTimes'),ylabel('Voltage') grid on axis([41 55 -0.1 0.4])
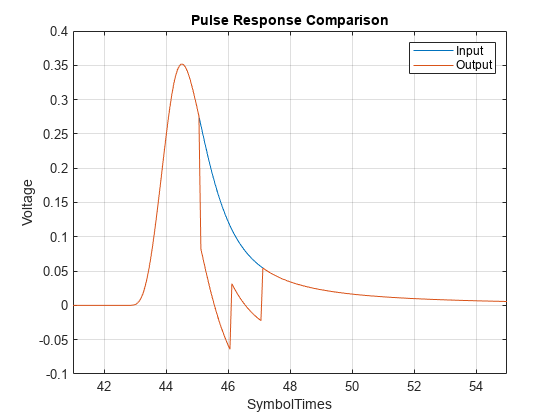
figure plot(t2,waveIn,t2,waveOut) legend('Input','Output') title('Waveform Comparison') xlabel('SymbolTimes'),ylabel('Voltage') grid on
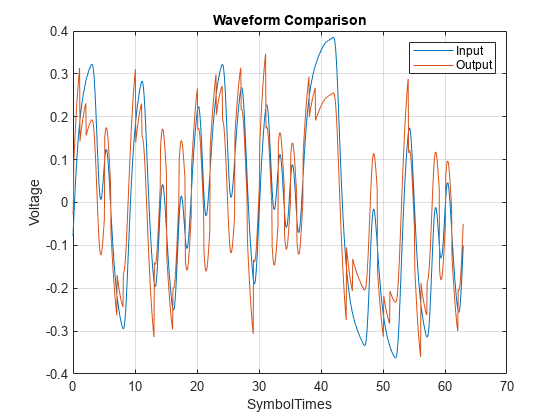
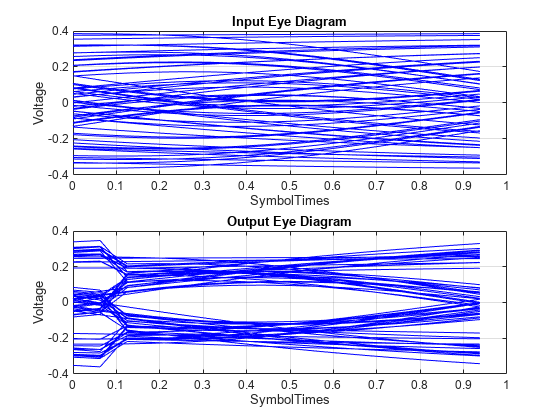
figure subplot(211),plot(teye,eyeIn,'b') xlabel('SymbolTimes'),ylabel('Voltage') grid on title('Input Eye Diagram') subplot(212),plot(teye,eyeOut,'b') xlabel('SymbolTimes'),ylabel('Voltage') grid on title('Output Eye Diagram')
This example shows how to process impulse response of a channel one sample at a time using serdes.DFECDR System object™.
Use a symbol time of 100 ps, with 8 samples per symbol. The channel loss is 14 dB. Select 12-th order pseudorandom binary sequence (PRBS), and simulate the first 20000 symbols.
SymbolTime = 100e-12; SamplesPerSymbol = 8; dbloss = 14; NumberOfDFETaps = 2; prbsOrder = 12; M = 20000;
Calculate the sample interval.
dt = SymbolTime/SamplesPerSymbol;
Create the DFECDR System object. Process the channel one sample at a time by setting the input waveforms to 'sample' type. The object adaptively applies the optimum DFE tap weights to input waveform.
DFE2 = serdes.DFECDR('SymbolTime',SymbolTime,'SampleInterval',dt,... 'Mode',2,'WaveType','Sample','TapWeights',zeros(NumberOfDFETaps,1),... 'EqualizationStep',0,'EqualizationGain',1e-3);
Create the channel impulse response.
channel = serdes.ChannelLoss('Loss',dbloss,'dt',dt,... 'TargetFrequency',1/SymbolTime/2);
Initialize the PRBS generator.
[dataBit,prbsSeed]=prbs(prbsOrder,1);
Generate the sample-by-sample eye diagram.
%Loop through one symbol at a time. inSymbol = zeros(SamplesPerSymbol,1); outWave = zeros(SamplesPerSymbol*M,1); dfeTapWeightHistory = nan(M,NumberOfDFETaps); for ii = 1:M %Get new symbol [dataBit,prbsSeed]=prbs(prbsOrder,1,prbsSeed); inSymbol(1:SamplesPerSymbol) = dataBit-0.5; %Convolve input waveform with channel y = channel(inSymbol); %Process one sample at a time through the DFE for jj = 1:SamplesPerSymbol [outWave((ii-1)*SamplesPerSymbol+jj),TapWeights] = DFE2(y(jj)); end %Save DFE taps dfeTapWeightHistory(ii,:) = TapWeights; end
Plot the DFE adaptation history.
figure plot(dfeTapWeightHistory) grid on legend('TapWeights(1)','TapWeights(2)') xlabel('Symbols') ylabel('Voltage') title('DFE Taps')
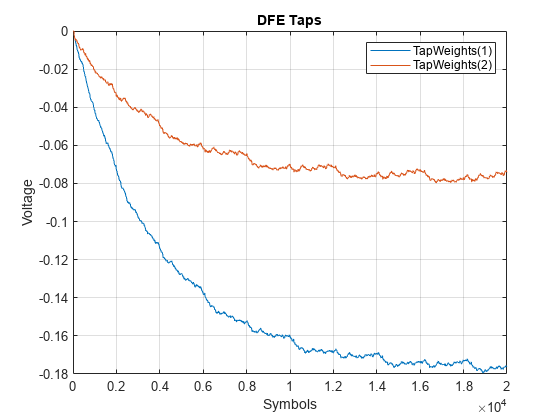
You can observe from the plot that the DFE adaptation is approximately complete after the first 10000 symbols, so these can be truncated from the array. Then plot the eye diagram by applying the reshape function to the array of symbols.
foldedEye = reshape(outWave(10000*SamplesPerSymbol+1:M*SamplesPerSymbol),SamplesPerSymbol,[]);
t = dt*(0:SamplesPerSymbol-1);
figure,plot(t,foldedEye,'b');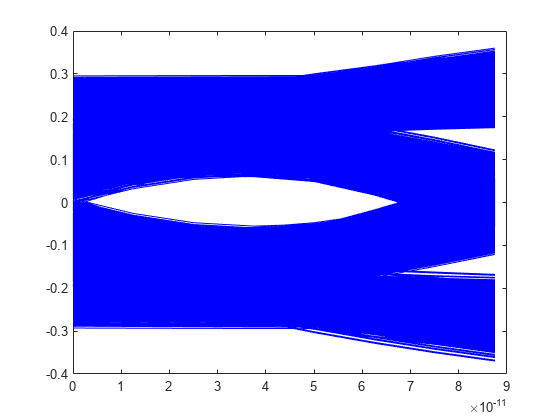
More About
Extended Capabilities
Version History
Introduced in R2019a
See Also
DFECDR | CTLE | CDR | serdes.CTLE | serdes.CDR