pointAt
Point satellite at target
Syntax
Description
Satellite Object
pointAt(
steers the satellites in the vector sat,coordinates)sat toward the geographical
coordinates [latitude; longitude; altitude] specified by
coordinates.
pointAt(
steers the satellites specified by the row vector sat,'nadir')sat toward the
nadir direction. 'nadir' is the default pointing direction.
pointAt(
sets the attitude of the satellite sat,attitudetable)sat such that it follows the
attitudes provided in attitudetable, which is a MATLAB®
timetable object.
pointAt(
specifies options using one or more name-value arguments in addition to the input
arguments in the previous sat,attitudetable,Name=Value)attitudetable syntax. For example, to
interpret the provided attitude values as the rotation from the Geocentric Celestial
Reference Frame (GCRF) to the body frame, set CoordinateFrame to
inertial.
pointAt(
sets the attitudes of the satellite sat,attitudetimeseries)sat such that it follows the
attitude provided in attitudetimeseries, which is a MATLAB
timeseries object.
pointAt(
specifies options using one or more name-value arguments in addition to the input
arguments in the previous sat,attitudetimeseries,Name=Value)attitudetimeseries syntax. For example, to
interpret the provided attitude values as the rotation from the GCRF to the body frame,
set CoordinateFrame to inertial.
Note
For transmitters and receivers, use this pointAt
function.
Gimbal Object
pointAt(
sets the gimbal angles (gimbal azimuth and gimbal elevation) of the gimbals in the vector
gimbal,'none')gimbal to zero. This setting is the default.
pointAt(
steers the gimbals in the vector gimbal,coordinates)gimbal toward the geographical
coordinates [latitude; longitude; altitude] specified by
coordinates.
pointAt(
steers the gimbals specified by the row vector gimbal,'nadir')gimbal toward the
nadir direction of their parents, namely, their parent's latitude, longitude, and 0 meter
altitude.
pointAt(
sets the orientation of the gimbals to align with the azimuth and elevation angles
provided in gimbal,steeringtable)steeringtable, which is a MATLAB
timetable object.
pointAt(
sets the orientation of the gimbals to align with the azimuth and elevation angles
provided in gimbal,steeringtimeseries)steeringtimeseries, which is MATLAB
timeseries object.
Examples
Create a satellite scenario object.
startTime = datetime(2021,6,10); % 10 June 2021, 12:00 AM UTC stopTime = datetime(2021,6,11); % 11 June 2021, 12:00 AM UTC sampleTime = 60; % seconds sc = satelliteScenario(startTime,stopTime,sampleTime);
Add a satellite to the scenario.
semiMajorAxis = 10000000; % meters eccentricity = 0; inclination = 10; % degrees rightAscensionOfAscendingNode = 0; % degrees argumentOfPeriapsis = 0; % degrees trueAnomaly = 0; % degrees sat = satellite(sc,semiMajorAxis,eccentricity, ... inclination,rightAscensionOfAscendingNode, ... argumentOfPeriapsis,trueAnomaly);
Add a ground station to the scenario.
latitude = 42.3501; % degrees longitude = -71.3504; % degrees gs = groundStation(sc,latitude,longitude);
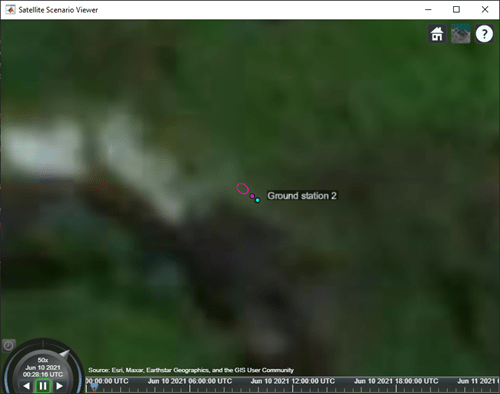
Add a gimbal to the ground station.
g = gimbal(gs,MountingLocation=[0; 0; -1],MountingAngles=[0; 180; 0]);
Add a conical sensor to the gimbal.
c = conicalSensor(g,MountingLocation=[0; 0; 0.5]);
Point the gimbal at the satellite.
pointAt(g,sat);
Visualize the scenario by using the Satellite Scenario Viewer.
v = satelliteScenarioViewer(sc);
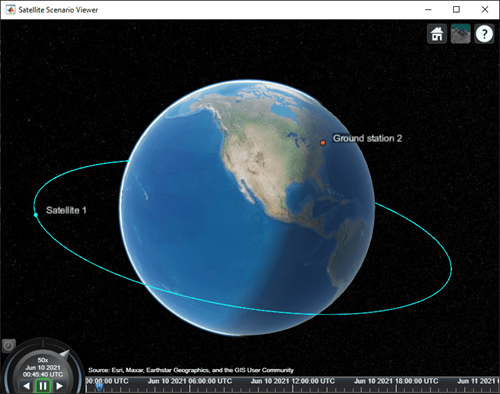
Play the scenario.
play(sc);
Set the ground station as the camera target.
camtarget(v,gs);
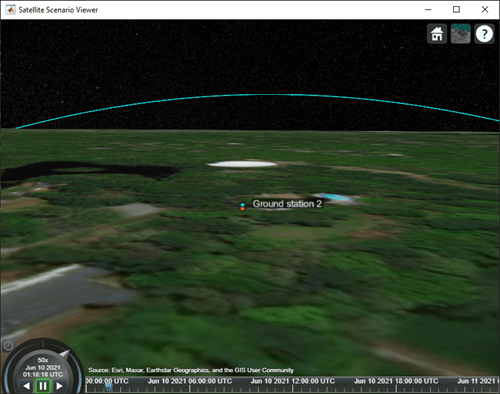
Visualize the field of view of the conical sensor and observe the change in orientation of the conical sensor.
fieldOfView(c);
Input Arguments
Name-Value Arguments
Version History
Introduced in R2021a
See Also
Objects
Functions
show|play|hide|access|groundStation|conicalSensor|transmitter|receiver