geoTrajectory
Description
The geoTrajectory
System object™ generates trajectories based on waypoints in geodetic coordinates. When you
create the System object, you can specify the time of arrival, velocity, and orientation at each
waypoint. The geoTrajectory
System object involves three coordinate systems. For more details, see Coordinate Frames in Geo Trajectory.
To generate an Earth-centered waypoint trajectory in geodetic coordinates:
Create the
geoTrajectoryobject and set its properties.Call the object as if it were a function.
To learn more about how System objects work, see What Are System Objects?.
Creation
Syntax
Description
trajectory = geoTrajectory(Waypoints,TimeOfArrival)geoTrajectory System object, trajectory,
based on the specified geodetic waypoints, Waypoints, and the
corresponding time, TimeOfArrival.
trajectory = geoTrajectory(Waypoints,TimeOfArrival,Name,Value)Name to the specified
Value. Unspecified properties and creation arguments have default or
inferred values.
Example: trajectory =
geoTrajectory([10,10,1000;10,11,1100],[0,3600]) creates a geodetic waypoint
trajectory System object, geojectory, that moves one degree in
longitude and 100 meters in altitude in one hour.
Creation Arguments
Creation arguments are properties which are set during creation of the System object and cannot be modified later. If you do not explicitly set a creation argument value, the property value is inferred.
You can specify Waypoints and TimeOfArrival as
value-only arguments or name-value pairs.
Properties
Usage
Description
[
outputs a frame of trajectory data based on specified creation arguments and properties,
where positionLLA,orientation,velocity,acceleration,angularVelocity,ecef2ref] = trajectory()trajectory is a geoTrajectory object.
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create a geoTrajectory with starting LLA at [15 15 0] and ending LLA at [75 75 100]. Set the flight time to ten hours. Sample the trajectory every 1000 seconds.
startLLA = [15 15 0];
endLLA = [75 75 100];
timeOfTravel = [0 3600*10];
sampleRate = 0.001;
trajectory = geoTrajectory([startLLA;endLLA],timeOfTravel,'SampleRate',sampleRate);Output the LLA waypoints of the trajectory.
positionsLLA = startLLA; while ~isDone(trajectory) positionsLLA = [positionsLLA;trajectory()]; end positionsLLA
positionsLLA = 37×3
15.0000 15.0000 0
16.6667 16.6667 2.7778
18.3333 18.3333 5.5556
20.0000 20.0000 8.3333
21.6667 21.6667 11.1111
23.3333 23.3333 13.8889
25.0000 25.0000 16.6667
26.6667 26.6667 19.4444
28.3333 28.3333 22.2222
30.0000 30.0000 25.0000
31.6667 31.6667 27.7778
33.3333 33.3333 30.5556
35.0000 35.0000 33.3333
36.6667 36.6667 36.1111
38.3333 38.3333 38.8889
⋮
Look up the Cartesian waypoints of the trajectory in the ECEF frame by using the lookupPose function.
sampleTimes = 0:1000:3600*10;
n = length(sampleTimes);
positionsCart = lookupPose(trajectory,sampleTimes,'ECEF');Visualize the results in the ECEF frame.
figure() km = 1000; plot3(positionsCart(1,1)/km,positionsCart(1,2)/km,positionsCart(1,3)/km, 'b*'); hold on; plot3(positionsCart(end,1)/km,positionsCart(end,2)/km,positionsCart(end,3)/km, 'bo'); plot3(positionsCart(:,1)/km,positionsCart(:,2)/km,positionsCart(:,3)/km,'b'); plot3([0 positionsCart(1,1)]/km,[0 positionsCart(1,2)]/km,[0 positionsCart(1,3)]/km,'k:'); plot3([0 positionsCart(end,1)]/km,[0 positionsCart(end,2)]/km,[0 positionsCart(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position', 'Trajectory')

Algorithms
The geoTrajectory System object involves three coordinate frames:
ECEF (Earth-Centered-Earth-Fixed) frame
Local reference frame: local NED (North-East-Down) or ENU (East-North-Up) frame
Target body frame
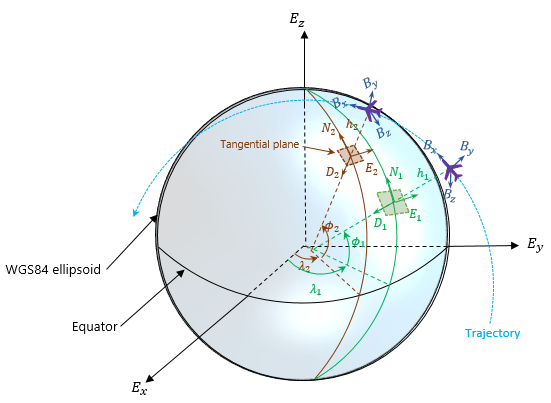
The figure shows an Earth-centered trajectory with two waypoints highlighted. The figures uses the NED local reference frame as an example, but you can certainly use the ENU local reference frame. In the figure,
Ex, Ey, and Ez are the three axes of the ECEF frame, which is fixed on the Earth.
Bx, By, and Bz are the three axes of the target body frame, which is fixed on the target.
N, E, and D are the three axes of the local NED frame. The figure highlights two local NED reference frames, N1-E1-D1 and N2-E2-D2. The origin of each local NED frame is the Earth surface point corresponding to the trajectory waypoint based on the WGS84 ellipsoid model. The horizontal plane of the local NED frame is tangent to the WGS84 ellipsoid model's surface.
λ and ϕ are the geodetic longitude and latitude, respectively. The orientation of the target by using the NED local frame convention is defined as the rotation from the local NED frame to the target's body frame, such as the rotation from N1-E1-D1 to Bx-By-Bz.
Extended Capabilities
Version History
Introduced in R2024a