Call ROS 2 Service in Simulink
This example shows how to implement a ROS 2 service client in Simulink® and call a service on the ROS 2 network using the Call Service block. You then receive a response from the service server and view it in the model.
To create a ROS 2 service server in Simulink, see Create ROS 2 Service Server in Simulink.
Set Up ROS 2 Network and Service Server
Create a sample ROS 2 network with one node.
node_1 = ros2node(exampleHelperCreateRandomNodeName);
Create a service that adds two integers using the existing service type example_interfaces/AddTwoInts. Specify the callback function to be exampleHelperROS2SumCallback which performs the addition of numbers in the a and b fields of the service request message.
sumserver = ros2svcserver(node_1,"/sum","example_interfaces/AddTwoInts",@exampleHelperROS2SumCallback);
Call Service Server from Simulink
Open the Simulink model with the Call Service block. Use the Blank Message block to output a request message with the example_interfaces/AddTwoIntsRequest message type. Populate the bus with two values to sum together. You can ignore warnings about converting data types.
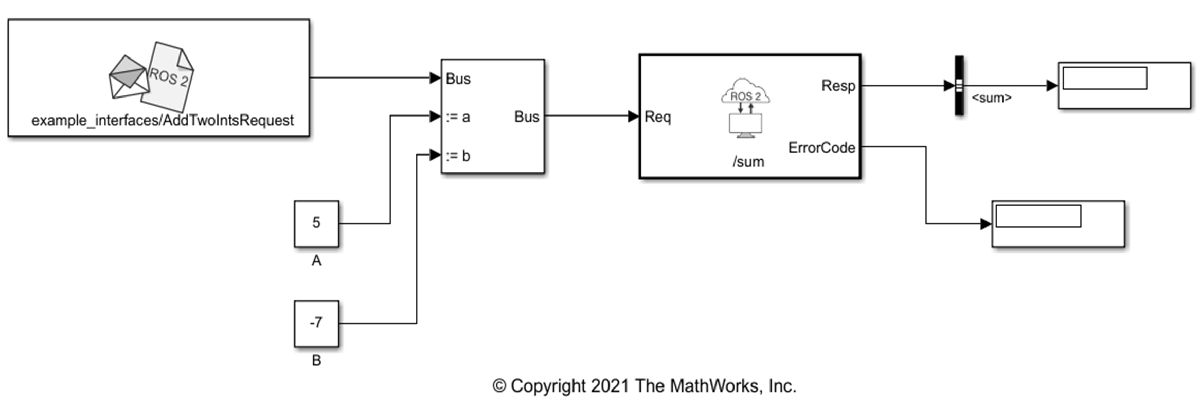
open_system("AddTwoIntsROS2ServiceExampleModel.slx")Run the model. The service call should return -2 from the Resp output port, as part of the sum field in the response message. An error code of 0 indicates that the service call was successful.
sim("AddTwoIntsROS2ServiceExampleModel.slx");See Also
Call Service | Receive Service Request | Send Service Response