ros2RegisterMessages
Description
ros2RegisterMessages( registers the
custom messages with MATLAB®. Use this function to register the custom messages generated on another
computer running on the same platform and same version of MATLAB.genDir)
Note
The ros2RegisterMessages function allows sharing of the custom
messages on different machines running on the same platform only. Use the ros2genmsg
function on the new platform if the machines are running on different platforms.
Examples
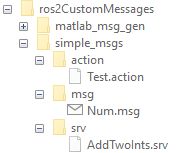
In this example, you create ROS 2 custom messages in MATLAB® to share them on another machine. This other machine must run on the same platform and same version of MATLAB. You must have a ROS 2 package that contains the required msg file, as this figure shows.
Open a new MATLAB session and create a custom message package folder in a local folder. Specify a short folder path when you generate custom messages on a Windows® machine to avoid limitations on the number of characters in the folder path. For example,
genDir = fullfile('C:/Work/ros2CustomMessages').
You can also use the BuildRoot parameter to specify an alternate shorter build path when generating the custom messages. For more details, see Create Shareable ROS 2 Custom Message Package.
genDir = fullfile(pwd,'ros2CustomMessages'); packagePath = fullfile(genDir,'simple_msgs'); mkdir(packagePath)
Create a folder named msg inside the custom message package folder.
mkdir(packagePath,'msg')Create a file named .msg inside the msg folder.
messageDefinition = {'int64 num'};
fileID = fopen(fullfile(packagePath,'msg', ...
'Num.msg'),'w');
fprintf(fileID,'%s\n',messageDefinition{:});
fclose(fileID);Create a folder named srv inside the custom message package folder.
mkdir(packagePath,'srv')Create a file named .srv inside the srv folder.
serviceDefinition = {'int64 a'
'int64 b'
'---'
'int64 sum'};
fileID = fopen(fullfile(packagePath,'srv', ...
'AddTwoInts.srv'),'w');
fprintf(fileID,'%s\n',serviceDefinition{:});
fclose(fileID);Create a folder named action inside the custom message package folder.
mkdir(packagePath,'action')Create a file named .action inside the action folder.
actionDefinition = {'int64 goal'
'---'
'int64 result'
'---'
'int64 feedback'};
fileID = fopen(fullfile(packagePath,'action', ...
'Test.action'),'w');
fprintf(fileID,'%s\n',actionDefinition{:});
fclose(fileID);You can also generate custom messages directly from ROS 2 IDL definitions in the specified folder. For more details, see the documentation for the ros2genmsg function.
Generate the custom messages from the ROS 2 definitions in .msg, .srv and .action files as a shareable ZIP archive.
ros2genmsg(genDir,CreateShareableFile=true)
Identifying message files in folder 'C:/Work/ros2CustomMessages'.Done. Validating message files in folder 'C:/Work/ros2CustomMessages'.Done. [1/1] Generating MATLAB interfaces for custom message packages... Done. Running colcon build in folder 'C:/Work/ros2CustomMessages/matlab_msg_gen/win64'. Build in progress. This may take several minutes... Build succeeded.build log Generating zip file in the folder 'C:/Work/ros2CustomMessages'.Done.

Copy the generated custom messages in the ZIP archive to the target computer and register it using the ros2RegisterMessages function.
ros2RegisterMessages(genDir)

Run ros2 msg list on the target computer to view the custom messages for using in the workflow.

Input Arguments
Version History
Introduced in R2022b
See Also
Topics
- Create Shareable ROS 2 Custom Message Package
- Add Input Layer to dlnetwork (Deep Learning Toolbox)