Automated Driving
ROS Toolbox enables you to design and deploy standalone applications for automated driving as nodes over a ROS or ROS 2 network. You can execute applications like parking valet, lane detection, vehicle detection and emergency braking in MATLAB® or Simulink®. You can then use the ROS or ROS 2 nodes for validating the applications with vehicle models or real-world sensor data.
Topics
- Automated Parking Valet with ROS 2 in Simulink
Distribute an automated parking valet application among various nodes in a ROS 2 network in Simulink.
- Publish Ground Truth and Sensor Data from RoadRunner Scenario to ROS 2 Network
Publish ground-truth and sensor data from a RoadRunner scenario to ROS 2 network and visualize it using ROS Data Analyzer app. (Since R2025a)
Featured Examples

Lane Detection in ROS 2 Using Deep Learning with MATLAB
Generate CUDA® optimized ROS 2 node for deep learning based lane detection algorithm.
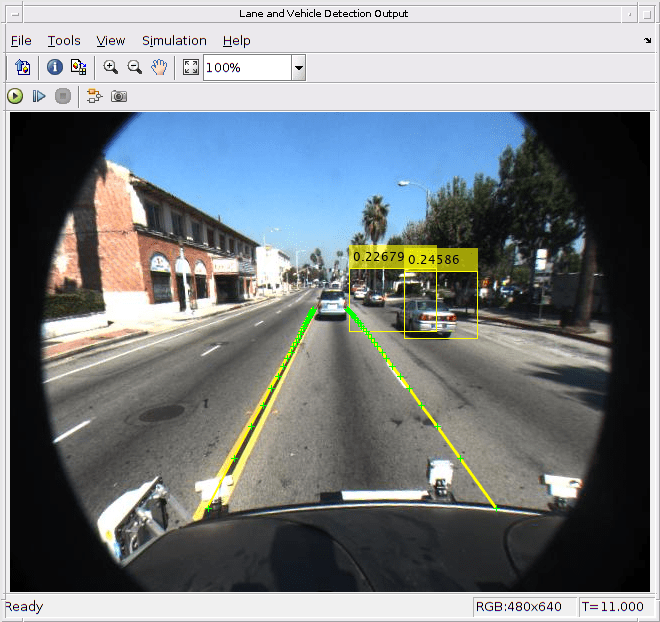
Lane and Vehicle Detection in ROS Using YOLO v2 Deep Learning Algorithm
Use deep convolutional neural networks inside a ROS enabled Simulink model to perform lane and vehicle detection.

Simulate Automated Parking Valet with ROS 2 in Simulink
Distribute an automated parking valet application among various nodes in a ROS 2 network in Simulink.

Generate and Deploy ROS 2 Nodes for Automated Parking Valet in Simulink
After simulating the ROS 2 nodes to verify all the components of the automated parking valet system as described in Simulate Automated Parking Valet with ROS 2 in Simulink, you can now generate code for those ROS 2 nodes and deploy them. Variant subsystem under each node will use publish and subscribe blocks to replace input and output ports.

Emergency Braking of Ego Vehicle in CARLA Simulator Using Simulink and CARLA ROS Bridge
Emergency braking of ego vehicle in CARLA using Simulink.
Publish Ground Truth and Sensor Data from RoadRunner Scenario to ROS 2 Network
Publish ground-truth and sensor data from a RoadRunner scenario to ROS 2 network and visualize it using ROS Data Analyzer app.

Automated Parking Valet with ROS in MATLAB
Distribute the Automated Parking Valet application among various nodes in a ROS network using MATLAB.

Automated Parking Valet with ROS 2 in MATLAB
Distribute the Automated Parking Valet application among various nodes in a ROS 2 network using MATLAB.

Automated Parking Valet with ROS in Simulink
Distribute an automated parking valet application among various nodes in a ROS network in Simulink.