mussv
Compute bounds on structured singular value (µ)
Syntax
Description
bounds
= mussv(M,BlockStructure)M and
a given block-diagonal uncertainty Delta configured as
follows.
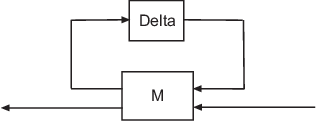
BlockStructure is a matrix encoding the block-diagonal
structure of Delta. μ is a generalization
of the singular value for uncertain systems. M is a numeric
array, a state-space (ss) model, or a frequency response
(frd) model.
In practice, μ is difficult to compute exactly, so the
software instead computes lower and upper bounds, and , returned in bounds. The upper bound can be used as a measure of the system's robust performance.
(See Robust Performance Measure for Mu Synthesis.)
[
returns a structure containing more detailed information. To extract the
information in bounds,muinfo] = mussv(M,BlockStructure)muinfo, use mussvextract.
[
specifies additional computation options. bounds,muinfo]
= mussv(M,BlockStructure,opt)
Examples
Compute bounds on the structured singular value of a system with three states, three outputs, and three inputs, with respect to an uncertain structure consisting of one instance of a diagonal real uncertainty and two repetitions of another diagonal real uncertainty. Start with a state-space model. For this example use a model with random dynamics.
rng('default'); % for repeatability Mss = rss(3,3,3); size(Mss)
State-space model with 3 outputs, 3 inputs, and 3 states.
Compute frequency response data for Mss over a range of frequencies.
w = logspace(-5,5,100); Mfr = freqresp(Mss,w); size(Mfr)
ans = 1×3
3 3 100
Create a matrix representing the uncertainty structure. To indicate the diagonal scalar uncertainty, set the first row to [-1,0]. To indicate the repeating instances of the second real uncertainty, set the second row to [-2,0].
BlockStructure = [-1,0;-2,0];
Compute the structured singular value. The 's' option suppresses the progress display during computation.
[bounds,muinfo] = mussv(Mfr,BlockStructure,'s');
size(bounds)ans = 1×3
1 2 100
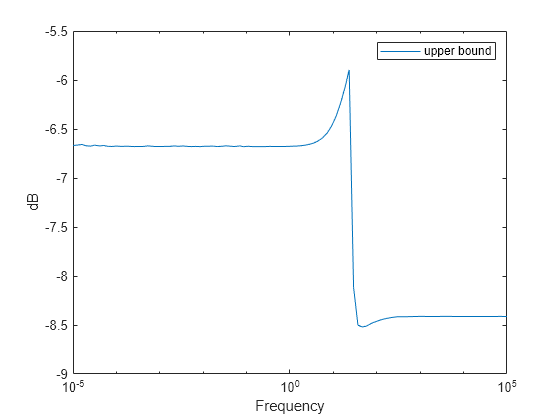
Each row of bounds contains the upper and lower bound on the structured singular value at a frequency in w. Examine the upper bound as a function of frequency.
upper = mag2db(squeeze(bounds(1,1,:))); semilogx(w,upper); legend("upper bound") xlabel("Frequency") ylabel("dB")
Input Arguments
Output Arguments
Algorithms
mussv computes the lower bound using a power method of [7] and [4], and the upper
bound using the balanced/AMI technique of [6] for computing the
upper bound from [2]. In the upper
bound computation, the matrix is first balanced using either a variation of Osborne's
method ([3]) generalized to
handle repeated scalar and full blocks, or a
Perron approach. This computation generates the standard upper bound for the associated
complex µ problem. The Perron eigenvector method is based on an idea
of Safonov ([5]). It gives the
exact computation of µ for positive matrices with scalar blocks, but
is comparable to Osborne on general matrices. Both the Perron and Osborne methods have
been modified to handle repeated scalar and
full blocks. Perron is faster for small matrices but has a
growth rate of n3, compared with less than
n2 for Osborne. This is partly due to
the MATLAB® implementation, which greatly favors Perron. The default is to use Perron
for simple block structures and Osborne for more complicated block structures. A
sequence of improvements to the upper bound is then made based on various equivalent
forms of the upper bound. A number of descent techniques are used that exploit the
structure of the problem, concluding with general purpose LMI optimization ([1]) to obtain the
final answer.
Peter Young and Matt Newlin wrote the original version of
mussv.
References
[1] Boyd, S. and L. El Ghaoui, “Methods of centers for minimizing generalized eigenvalues,” Linear Algebra and Its Applications, Vol. 188–189, 1993, pp. 63–111.
[2] Fan, M., A. Tits, and J. Doyle, “Robustness in the presence of mixed parametric uncertainty and unmodeled dynamics,” IEEE Transactions on Automatic Control, Vol. AC–36, 1991, pp. 25–38.
[3] Osborne, E., “On preconditioning of matrices,” Journal of Associated Computer Machines, Vol. 7, 1960, pp. 338–345.
[4] Packard, A.K., M. Fan and J. Doyle, “A power method for the structured singular value,” Proc. of 1988 IEEE Conference on Control and Decision, December 1988, pp. 2132–2137.
[5] Safonov, M., “Stability margins for diagonally perturbed multivariable feedback systems,” IEEE Proc., Vol. 129, Part D, 1992, pp. 251–256.
[6] Young, P. and J. Doyle, “Computation of with real and complex uncertainties,” Proceedings of the 29th IEEE Conference on Decision and Control, 1990, pp. 1230–1235.
[7] Young, P., M. Newlin, and J. Doyle, “Practical computation of the mixed problem,” Proceedings of the American Control Conference, 1992, pp. 2190–2194.
Version History
Introduced before R2006a
See Also
mussvextract | robstab | robgain | wcgain | wcdiskmargin