Trapezoidal Velocity Profile Trajectory
Generate trajectories through multiple waypoints using trapezoidal velocity profiles
Libraries:
Robotics System Toolbox /
Utilities
Description
The Trapezoidal Velocity Profile Trajectory block generates a trajectory through a given set of waypoints that follow a trapezoidal velocity profile. The block outputs positions, velocities, and accelerations for a trajectory based on the given waypoints and velocity profile parameters.
Examples
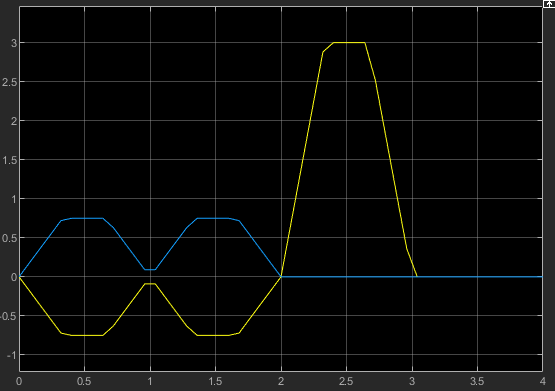
Generate Trapezoidal Velocity Trajectory
Generate a trapezoidal velocity trajectory using the Trapezoidal Velocity block in Simulink®.
Ports
Input
Time point along trajectory, specified as a scalar or vector. In general, when specified as a scalar, this value is synced with simulation time and is used to specify the time point for sampling the trajectory. The block outputs a vector of the trajectory variables at that instant in time. If the time is specified as a vector, the block outputs a matrix with each column corresponding to each element of the vector.
Data Types: single | double
Positions of waypoints of the trajectory at given time points, specified as an n-by-p matrix, where n is the dimension of the trajectory and p is the number of waypoints.
Dependencies
To enable this input, set Waypoint source to
External.
Peak velocity of the profile segment, specified as a scalar, vector, or matrix. This peak velocity is the highest velocity achieved during the trapezoidal velocity profile.
A scalar value is applied to all elements of the trajectory and between all waypoints. An n-element vector is applied to each element of the trajectory between all waypoints. An n-by-(p – 1) matrix is applied to each element of the trajectory for each waypoint.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2. Set Parameter 1
or Parameter 2 to Peak Velocity. Then, set
Parameter source to External.
Data Types: single | double
Acceleration of the velocity profile, specified as a scalar, vector, or matrix. This acceleration defines the constant acceleration from zero velocity to the Peak velocity value.
A scalar value is applied to all elements of the trajectory and between all waypoints. An n-element vector is applied to each element of the trajectory between all waypoints. An n-by-(p – 1) matrix is applied to each element of the trajectory for each waypoint.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2. Set Parameter 1
or Parameter 2 to Acceleration. Then, set
Parameter source to External.
Data Types: single | double
Duration of trajectory segment, specified as a scalar, vector, or matrix.
A scalar value is applied to all elements of the trajectory and between all waypoints. An n-element vector is applied to each element of the trajectory between all waypoints. An n-by-(p – 1) matrix is applied to each element of the trajectory for each waypoint.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2. set Parameter 1
or Parameter 2 to End Time. Then, set
Parameter source to External.
Data Types: single | double
Duration of acceleration phase of velocity profile, specified as a scalar, vector, or matrix.
A scalar value is applied to all elements of the trajectory and between all waypoints. An n-element vector is applied to each element of the trajectory between all waypoints. An n-by-(p – 1) matrix is applied to each element of the trajectory for each waypoint.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2. set Parameter 1
or Parameter 2 to Acceleration Time. Then,
set Parameter source to External.
Data Types: single | double
Output
Position of the trajectory, specified as a scalar, vector, or matrix. If you
specify a scalar for the Time input with an
n-dimensional trajectory, the output is a vector with
n elements. If you specify a vector of m
elements for the Time input, the output is an
n-by-m matrix.
Data Types: single | double
Velocity of the trajectory, specified as a scalar, vector, or matrix. If you
specify a scalar for the Time input with an
n-dimensional trajectory, the output is a vector with
n elements. If you specify a vector of m
elements for the Time input, the output is an
n-by-m matrix.
Data Types: single | double
Acceleration of the trajectory, specified as a scalar, vector, or matrix. If you
specify a scalar for the Time input with an
n-dimensional trajectory, the output is a vector with
n elements. If you specify a vector of m
elements for the Time input, the output is an
n-by-m matrix.
Data Types: single | double
Parameters
Specify External to specify the Waypoints
and Time points parameters as block inputs instead of block
parameters.
Positions of waypoints of the trajectory at given time points, specified as an n-by-p matrix, where n is the dimension of the trajectory and p is the number of waypoints.
Number of velocity profile parameters, specified as 0,
1, or 2. Increasing this value adds
Parameter 1 and Parameter 2 for specifying
parameters for the velocity profile.
Velocity profile parameter, specified as Peak Velocity,
Acceleration, End Time, or Acceleration
Time. Setting this parameter creates a parameter in the mask with this value
as its name.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2.
If Parameter Source is set to Internal,
this parameter creates a parameter in the mask with this value as its name.
If Parameter Source is set to External,
this parameter creates an input port based on this value.
Velocity profile parameter, specified as Peak Velocity,
Acceleration, End Time, or Acceleration
Time. Setting this parameter creates a parameter in the mask with this value
as its name.
Dependencies
To enable this parameter, set Number of parameters to
2.
If Parameter Source is set to Internal,
this parameter creates a parameter in the mask with this value as its name.
If Parameter Source is set to External,
this parameter creates an input port based on this value.
Specify External to specify the velocity profile parameters as
block inputs instead of block parameters.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2.
Peak velocity of the profile segment, specified as a scalar, vector, or matrix. This peak velocity is the highest velocity achieved during the trapezoidal velocity profile.
A scalar value is applied to all elements of the trajectory and between all waypoints. An n-element vector is applied to each element of the trajectory between all waypoints. An n-by-(p – 1) matrix is applied to each element of the trajectory for each waypoint.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2. Then, set Parameter
1 or Parameter 2 to Peak
Velocity.
Data Types: single | double
Acceleration of the velocity profile, specified as a scalar, vector, or matrix. This acceleration defines the constant acceleration from zero velocity to the Peak velocity value.
A scalar value is applied to all elements of the trajectory and between all waypoints. An n-element vector is applied to each element of the trajectory between all waypoints. An n-by-(p – 1) matrix is applied to each element of the trajectory for each waypoint.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2. Then, set Parameter
1 or Parameter 2 to
Acceleration.
Data Types: single | double
Duration of trajectory segment, specified as a scalar, vector, or matrix.
A scalar value is applied to all elements of the trajectory and between all waypoints. An n-element vector is applied to each element of the trajectory between all waypoints. An n-by-(p – 1) matrix is applied to each element of the trajectory for each waypoint.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2. Then, set Parameter
1 or Parameter 2 to End
Time.
Data Types: single | double
Duration of acceleration phase of velocity profile, specified as a scalar, vector, or matrix.
A scalar value is applied to all elements of the trajectory and between all waypoints. An n-element vector is applied to each element of the trajectory between all waypoints. An n-by-(p – 1) matrix is applied to each element of the trajectory for each waypoint.
Dependencies
To enable this parameter, set Number of parameters to
1 or 2. Then, set Parameter
1 or Parameter 2 to Acceleration
Time.
Data Types: single | double
Interpreted execution— Simulate model using the MATLAB® interpreter. This option shortens startup time but has a slower simulation speed thanCode generation. In this mode, you can debug the source code of the block.Code generation— Simulate model using generated C code. The first time you run a simulation, Simulink generates C code for the block. The C code is reused for subsequent simulations, as long as the model does not change. This option requires additional startup time, but the speed of the subsequent simulations is comparable toInterpreted execution.
Tunable: No
Tips
For better performance, consider these options:
Minimize the number of waypoint or parameter changes.
Set the Waypoint source parameter to
Internal.Set the Simulate using parameter to
Code generation. For more information, see Interpreted Execution vs. Code Generation (Simulink).
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning and Control. Cambridge: Cambridge University Press, 2017.
[2] Spong, Mark W., Seth Hutchinson, and M. Vidyasagar. Robot Modeling and Control. John Wiley & Sons, 2006.
Extended Capabilities
C/C++ Code Generation
Generate C and C++ code using Simulink® Coder™.
Version History
Introduced in R2019a
See Also
Blocks
Functions
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)