blindzonemap
Syntax
Description
BZM = blindzonemap(R,V,PRF,fc,rmin,vmin)BZM for a pulse-Doppler radar transmitting at
a pulse repetition frequency of PRF. The blind zone map is constructed
for ranges in R and velocities in V. The minimum
detectable range of the radar is rmin and the minimum detectable
velocity is vmin. The function assumes that ranges between 0 and
rmin are blind to the radar at all velocities.
blindzonemap(___) plots a blind zone map.
Examples
A 10 GHz X-band radar transmits pulses at two PRFs: 10151 Hz and 14163 Hz. The minimum detectable range of the system is 1000 m. The width of the main beam clutter rejection notch is 50 m/s. The sidelobe clutter extends from 34.5 km to 36.5 km when transmitting at the first PRF and from 36.3 km to 39.8 when transmitting the second PRF. Compute the blind zone map for velocities from 0 to 600 m/s and ranges between 0 and 100 km.
Set the carrier frequency to 10 GHz.
fc = 10e9;
Set the PRFs.
PRF = [10151 14163];
Set the minimum range to 1 km.
rmin = 1000;
Set the span of range values.
R = linspace(0,100e3,1000);
Ranges that are blind due to sidelobe clutter are added through the range mask input argument.
rangeMask = false(numel(R),numel(PRF));
Sidelobe clutter at PRF=10151 Hz.
rangeMask(R>34500 & R<36500,1) = true;
Sidelobe clutter at PRF=14163 Hz.
rangeMask(R>36300 & R<39800,2) = true;
Set half width of the main beam clutter rejection notch.
vmin = 25;
Set the span of velocity values.
V = linspace(0,600,1000);
Plot the blind zone map.
blindzonemap(R,V,PRF,fc,rmin,vmin,'RangeMask',rangeMask)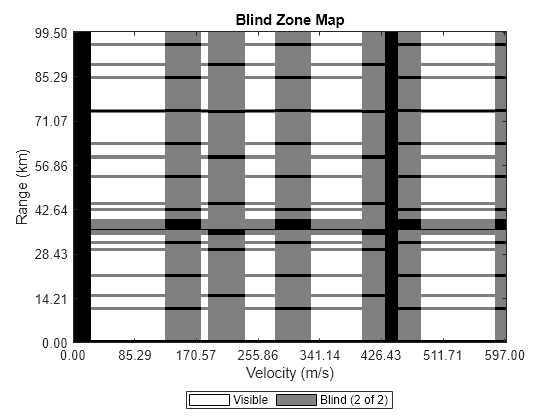
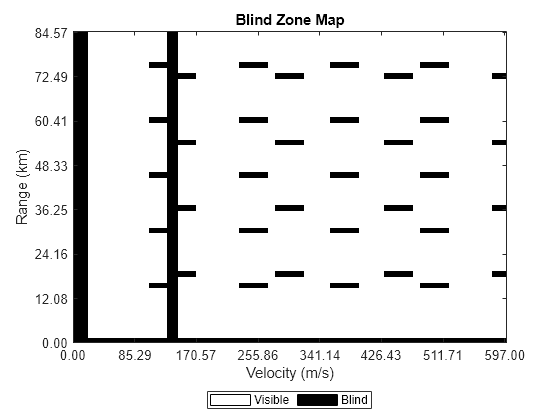
A 10 GHz X-band medium PRF radar transmits at two pulse repetition intervals: 0.1 ms and 0.12 ms. The pulse width is. The system also has a notch to reject slow moving targets with velocities up to 20 meters/sec. Plot a blind zone map assuming that the 1-of-2 PRF detection criterion is used.
Choose the carrier frequency as 10 GHz.
fc = 10e9;
Set the pulse width to.
tau = 10e-6;
Set the minimum detectable range from the pulse width.
rmin = time2range(tau);
Set the minimum detectable velocity to 20 meters/sec.
vmin = 20;
Choose two pulse repetition intervals.
PRF = 1./[1e-4 1.2e-4];
Set the range values.
R = linspace(0,85e3,1000);
Set the velocity values.
V = linspace(0,600,1000);
Display the blind zone map.
blindzonemap(R,V,PRF,fc,rmin,vmin,1)
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2023a