phased.IsotropicHydrophone
Isotropic hydrophone element
Description
The phased.IsotropicHydrophone
System object™ models an isotropic hydrophone for sonar applications. An isotropic
hydrophone has the same response in all signal directions. The response is the output
voltage of the hydrophone per unit sound pressure. The response of a hydrophone is also
called its sensitivity. You can specify the response using the
VoltageSensitivity property.
To compute the response of the isotropic hydrophone element for specified directions:
Create the
phased.IsotropicHydrophoneobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
hydrophone = phased.IsotropicHydrophonehydrophone.
hydrophone = phased.IsotropicHydrophone(Name=Value)hydrophone, with
each specified property set to the specified value. You can specify additional
name-value pair arguments in any order as
(Name1=Value1,...,NameN=ValueN).
Example: hydrophone = phased.IsotropicHydrophone(FrequencyRange=[0
1000],BackBaffled=true) creates an isotropic hydrophone element
with its frequency range specified between 0 and 1000 Hz.
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Compute the response of an isotropic hydrophone operating at 2 kHz. The hydrophone has default property values.
Obtain the voltage sensitivity at five different elevation angles: , , , and . All azimuth angles are at . The sensitivities are computed at the signal frequency of 2 kHz.
hydrophone = phased.IsotropicHydrophone; fc = 2e3; resp = hydrophone(fc,[0 0 0 0 0;-30 -15 0 15 30]);
Examine the response and patterns of an isotropic hydrophone operating between 1 kHz and 10 kHz.
Set up the hydrophone parameters. Obtain the voltage sensitivity at five different elevation angles: , , , and . All azimuth angles are at . The sensitivities are computed at the signal frequency of 2 kHz.
hydrophone = phased.IsotropicHydrophone(FrequencyRange= ...
[1 10]*1e3);
fc = 2e3;
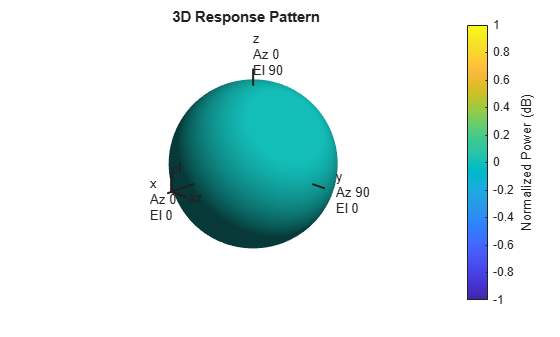
resp = hydrophone(fc,[0 0 0 0 0;-30 -15 0 15 30]);Draw a 3-D plot of the voltage sensitivity.
pattern(hydrophone,fc,[-180:180],[-90:90], ... CoordinateSystem="polar",Type="powerdb")
Examine the response and patterns of an isotropic hydrophone at three different frequencies. The hydrophone operates between 1 kHz and 10 kHz. Specify the voltage sensitivity as a vector.
Set up the hydrophone parameters and obtain the voltage sensitivity at 45° azimuth and 30° elevation. Compute the sensitivities at the signal frequencies of 2, 5, and 7 kHz.
hydrophone = phased.IsotropicHydrophone(FrequencyRange=[1 10]*1e3, ...
VoltageSensitivity=[-100 -90 -100]);
fc = [2e3 5e3 7e3];
resp = hydrophone(fc,[45;30])resp = 1×3
14.8051 29.2202 24.4152
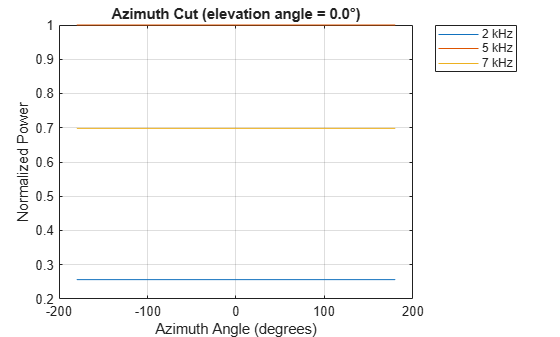
Draw a 2-D plot of the voltage sensitivity as a function of azimuth.
pattern(hydrophone,fc,[-180:180],0,CoordinateSystem="rectangular",... Type="power")
Compute the directivity of an isotropic hydrophone in different directions. Assume the signal frequency is 3 kHz. First, set up the hydrophone parameters.
fc = 3e3; hydrophone = phased.IsotropicHydrophone('FrequencyRange',[1,10]*1e3, ... 'VoltageSensitivity',[-100,-90,-100]); patternElevation(hydrophone,fc,45)
First, select the angles of interest to be constant elevation angle at zero degrees. The five azimuth angles are centered around boresight (zero degrees azimuth and zero degrees elevation).
ang = [-20,-10,0,10,20; 0,0,0,0,0];
Compute the directivity along the constant elevation cut.
d = directivity(hydrophone,fc,ang)
d = 5×1
0
0
0
0
0
The directivity of an isotropic hydrophone is zero in every direction.
Examine the response and patterns of an isotropic hydrophone at three different frequencies. The hydrophone operates between 1 kHz and 10 kHz. Specify the voltage sensitivity as a vector.
Set up the hydrophone parameters and obtain the voltage sensitivity at 45° azimuth and 30° elevation. Compute the sensitivities at the signal frequencies of 2, 5, and 7 kHz.
hydrophone = phased.IsotropicHydrophone(FrequencyRange=[1 10]*1e3, ...
VoltageSensitivity=[-100 -90 -100]);
fc = [2e3 5e3 7e3];
resp = hydrophone(fc,[45;30])resp = 1×3
14.8051 29.2202 24.4152
Draw a 2-D plot of the voltage sensitivity as a function of azimuth.
pattern(hydrophone,fc,[-180:180],0,CoordinateSystem="rectangular",... Type="power")
Examine the azimuth pattern of an isotropic hydrophone at 30° elevation. The frequency range is between 1 kHz and 10 kHz. Specify the voltage sensitivity as a vector.
First, set up the hydrophone parameters.
fc = 3e3;
hydrophone = phased.IsotropicHydrophone(FrequencyRange=[1,10]*1e3, ...
VoltageSensitivity=[-100,-90,-100]);
patternAzimuth(hydrophone,fc,30)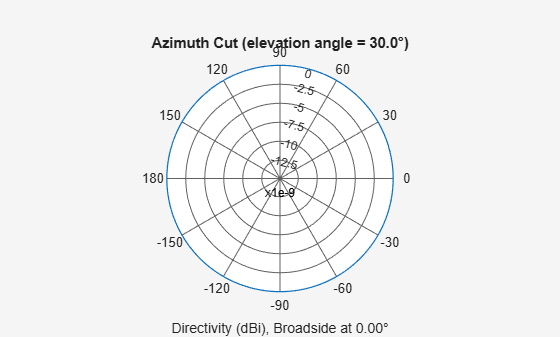
Plot a smaller range of azimuth angles using the Azimuth parameter.
patternAzimuth(hydrophone,fc,30,Azimuth=[-20:20])
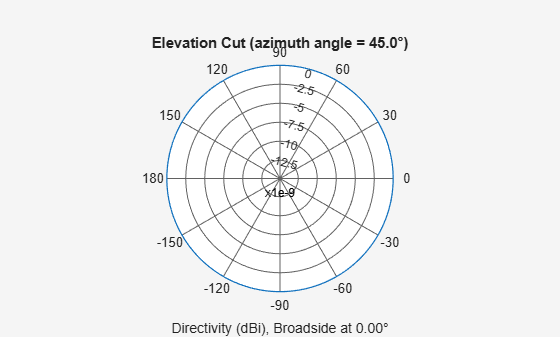
Plot an elevation cut of directivity of an isotropic hydrophone at 45° azimuth. Assume the signal frequency is 3 kHz. First, set up the hydrophone parameters.
fc = 3e3;
hydrophone = phased.IsotropicHydrophone(FrequencyRange=[1,10]*1e3, ...
VoltageSensitivity=[-100,-90,-100]);
patternElevation(hydrophone,fc,45)
Plot a smaller range of elevation angles using the Elevation parameter.
patternElevation(hydrophone,fc,45,Elevation=-20:20)
More About
Algorithms
The total sensitivity of a hydrophone is a combination of its frequency sensitivity
and spatial sensitivity. phased.IsotropicHydrophone
calculates both sensitivities using nearest neighbor interpolation, and then multiplies
the sensitivities to form the total sensitivity.
References
[1] Urick, R.J. Principles of Underwater Sound. 3rd Edition. New York: Peninsula Publishing, 1996.
[2] Sherman, C.S., and J. Butler. Transducers and Arrays for Underwater Sound. New York: Springer, 2007.
[3] Allen, J.B., and D. Berkely. “Image method for efficiently simulating small-room acoustics”, Journal of the Acoustical Society of America. Vol. 65, No. 4. April 1979, pp. 943–950.
[4] Van Trees, H. Optimum Array Processing. New York: Wiley-Interscience, 2002, pp. 274–304.
Extended Capabilities
Version History
Introduced in R2017a