closestPointsToSequence
Syntax
Description
pathPoints = closestPointsToSequence(refPath,points,initWindow)points, to be
within the valid search window, initWindow. For each point in
Points, the search window is centered at the previous point.
[
optionally returns a logical vector pathPoints,inWindow] = closestPointsToSequence(refPath,points,initWindow)inWindow, specifying whether each
point for the corresponding xy coordinate in points
is projected within the search window.
Examples
[refPath,generator,f0,f1] = closestPointExampleSetup;
Define the plot helper functions.
mergeFcn = @(v1,v2)reshape([v1 v2 nan(size(v1,1),size(v2,2))]',[],1); plotFcn = @(L1,L2,linespec)plot(mergeFcn(L1(:,1),L2(:,1:min(1,size(L2,2)))), ... mergeFcn(L1(:,2),L2(:,2:min(2,size(L2,2)))),linespec{:}); plotInterval = @(bounds,nPt,linespec)plotFcn(interpolate(... refPath,linspace(bounds(1),bounds(2),nPt)'),[],linespec);
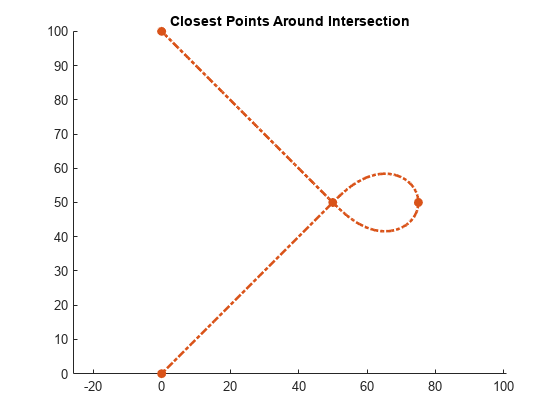
Generate a trajectory which itself contains an intersection.
f2 = f1; f2(1) = refPath.SegmentParameters(4,end) + 20;
Set the states such that it starts from rest and terminates with a positive velocity and no acceleration.
f0(2) = 0; % Initial lon. speed set to 0 f2(2) = 5; % Terminal lon. speed set to 5 deltaS = (f2(1)-f0(1)); % Longitudinal distance traveled vAvgEstimate = (f2(2)-f0(2))/2; % Rough average lon. velocity estimate T2 = deltaS/vAvgEstimate; % Ballpark travel duration
Generate the trajectory.
[fIntersecting,gIntersecting] = connect(generator,f0,f2,T2); gXingPts = gIntersecting.Trajectory;
Plot the trajectory.
figure
show(refPath);
xlim([0 125])
ylim([0 125])
hold on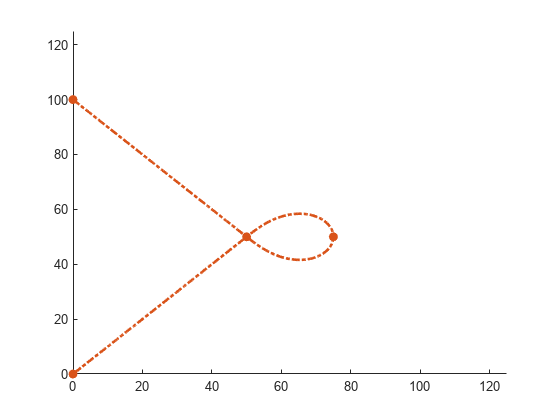
Find the closest points across trajectory.
closestPts = closestPoint(refPath,gXingPts);
Find closest points in window that spans the full trajectory length.
windowBuffer = 5; fXingPts = fIntersecting.Trajectory; fixedWindow = [min(fXingPts(:,1))-windowBuffer max(fXingPts(:,1))+windowBuffer]; closestPtsFullWindow = closestPoint(refPath,gXingPts,fixedWindow);
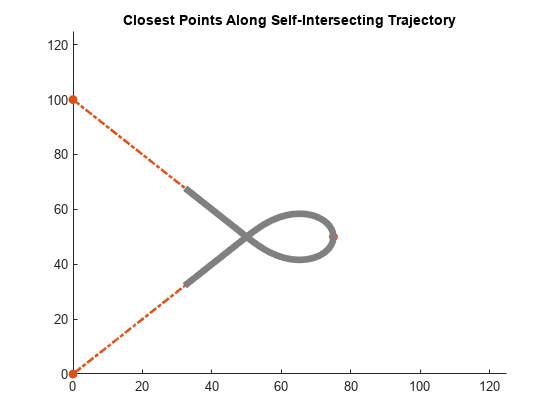
Plot the naive closest-points here.
title("Closest Points Along Self-Intersecting Trajectory") plotInterval(fixedWindow,100,{"Color",[.5 .5 .5],"LineWidth",5});
Calculate a sliding window size based on the max global velocity. Note that this may not cover the trajectory depending on the shape of the reference path.
dsApprox = max(abs(gXingPts(:,5)))*generator.TimeResolution; initialWindow = fXingPts(1)+[-1 1]*dsApprox; [closestPtsSlidingWindow, inWindow] = closestPointsToSequence(refPath,gXingPts,initialWindow);
Calculate the region swept by the sliding window. Then plot the swept region.
sweptRegion = [closestPtsSlidingWindow(1,end)-dsApprox,closestPtsSlidingWindow(end-1,end)+dsApprox];
plotInterval(sweptRegion,100,{":","Color",[.25 .25 .25],"LineWidth",3});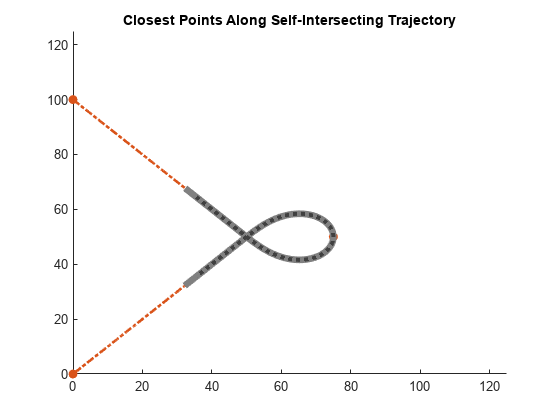
finalWindow = [closestPtsSlidingWindow(end-1,end)-dsApprox,closestPtsSlidingWindow(end-1,end)+dsApprox];
plotInterval(finalWindow,100,{"k","LineWidth",5});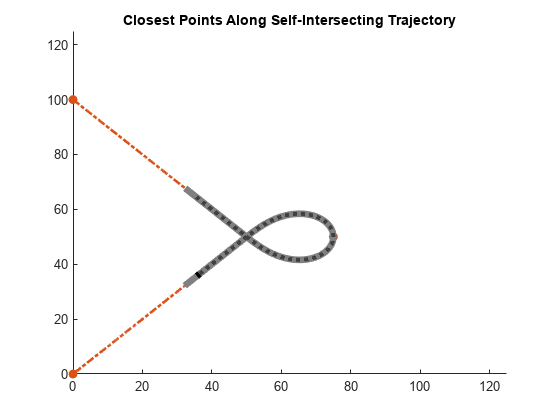
Display results.
plotFcn(gXingPts,[],{"k.-"});
plotFcn(gXingPts,closestPts,{"b","LineWidth",3});
plotFcn(gXingPts,closestPtsFullWindow,{"m","LineWidth",2})
plotFcn(gXingPts(inWindow,:),closestPtsSlidingWindow(inWindow,:),{"g"});
plotFcn(gXingPts(~inWindow,:),closestPtsSlidingWindow(~inWindow,:),{"r"});
legend({"Waypoints","ReferencePath","FixedWindow", ...
"SlidingWindowSweptRegion","SlidingWindowFinalSpan", ...
"Trajectory", "ClosestPoint","ClosestInsideFixedWindow", ...
"ClosestInsideSlidingWindow"});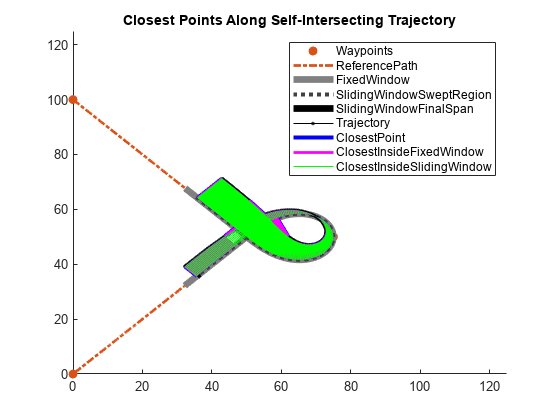
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2022a