insSensor
Inertial navigation system and GNSS/GPS simulation model
Description
The insSensor
System object™ models a device that fuses measurements from an inertial navigation system (INS)
and global navigation satellite system (GNSS) such as a GPS, and outputs the fused
measurements.
To output fused INS and GNSS measurements:
Create the
insSensorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
INS = insSensorINS, that models a device that outputs measurements from
an INS and GNSS.
INS = insSensor(Name,Value)
Properties
Usage
Description
measurement = INS(gTruth)gTruth.
measurement = INS(gTruth,simTime)simTime. To enable
this syntax, set the TimeInput
property to true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
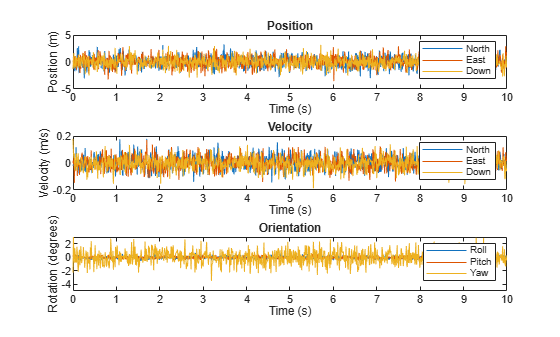
Create a motion structure that defines a stationary position at the local north-east-down (NED) origin. Because the platform is stationary, you need to define only a single sample. Assume the ground-truth motion is sampled for 10 seconds with a 100 Hz sample rate. Create a default insSensor System object™. Preallocate variables to hold output from the insSensor object.
Fs = 100; duration = 10; numSamples = Fs*duration; motion = struct( ... 'Position',zeros(1,3), ... 'Velocity',zeros(1,3), ... 'Orientation',ones(1,1,'quaternion')); INS = insSensor; positionMeasurements = zeros(numSamples,3); velocityMeasurements = zeros(numSamples,3); orientationMeasurements = zeros(numSamples,1,'quaternion');
In a loop, call INS with the stationary motion structure to return the position, velocity, and orientation measurements in the local NED coordinate system. Log the position, velocity, and orientation measurements.
for i = 1:numSamples measurements = INS(motion); positionMeasurements(i,:) = measurements.Position; velocityMeasurements(i,:) = measurements.Velocity; orientationMeasurements(i) = measurements.Orientation; end
Convert the orientation from quaternions to Euler angles for visualization purposes. Plot the position, velocity, and orientation measurements over time.
orientationMeasurements = eulerd(orientationMeasurements,'XYZ','frame'); t = (0:(numSamples-1))/Fs; subplot(3,1,1) plot(t,positionMeasurements) title('Position') xlabel('Time (s)') ylabel('Position (m)') legend('North','East','Down') subplot(3,1,2) plot(t,velocityMeasurements) title('Velocity') xlabel('Time (s)') ylabel('Velocity (m/s)') legend('North','East','Down') subplot(3,1,3) plot(t,orientationMeasurements) title('Orientation') xlabel('Time (s)') ylabel('Rotation (degrees)') legend('Roll', 'Pitch', 'Yaw')
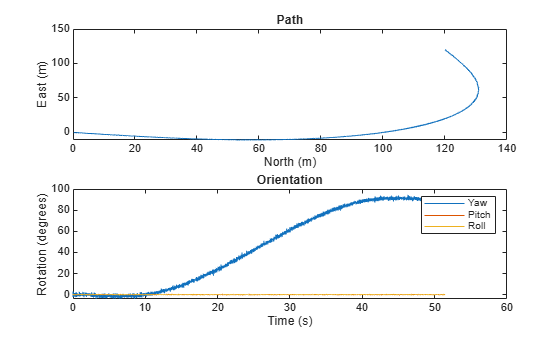
Generate INS measurements using the insSensor System object™. Use waypointTrajectory to generate the ground-truth path.
Specify a ground-truth orientation that begins with the sensor body x-axis aligned with North and ends with the sensor body x-axis aligned with East. Specify waypoints for an arc trajectory and a time-of-arrival vector for the corresponding waypoints. Use a 100 Hz sample rate. Create a waypointTrajectory System object with the waypoint constraints, and set SamplesPerFrame so that the entire trajectory is output with one call.
eulerAngles = [0,0,0; ... 0,0,0; ... 90,0,0; ... 90,0,0]; orientation = quaternion(eulerAngles,'eulerd','ZYX','frame'); r = 20; waypoints = [0,0,0; ... 100,0,0; ... 100+r,r,0; ... 100+r,100+r,0]; toa = [0,10,10+(2*pi*r/4),20+(2*pi*r/4)]; Fs = 100; numSamples = floor(Fs*toa(end)); path = waypointTrajectory('Waypoints',waypoints, ... 'TimeOfArrival',toa, ... 'Orientation',orientation, ... 'SampleRate',Fs, ... 'SamplesPerFrame',numSamples);
Create an insSensor System object to model receiving INS data. Set the PositionAccuracy to 0.1.
ins = insSensor('PositionAccuracy',0.1);Call the waypoint trajectory object, path, to generate the ground-truth motion. Call the INS simulator, ins, with the ground-truth motion to generate INS measurements.
[motion.Position,motion.Orientation,motion.Velocity] = path(); insMeas = ins(motion);
Convert the orientation returned by ins to Euler angles in degrees for visualization purposes. Plot the full path and orientation over time.
orientationMeasurementEuler = eulerd(insMeas.Orientation,'ZYX','frame'); subplot(2,1,1) plot(insMeas.Position(:,1),insMeas.Position(:,2)); title('Path') xlabel('North (m)') ylabel('East (m)') subplot(2,1,2) t = (0:(numSamples-1)).'/Fs; plot(t,orientationMeasurementEuler(:,1), ... t,orientationMeasurementEuler(:,2), ... t,orientationMeasurementEuler(:,3)); title('Orientation') legend('Yaw','Pitch','Roll') xlabel('Time (s)') ylabel('Rotation (degrees)')
Extended Capabilities
Version History
Introduced in R2020b