cloffset
Compute closed-loop DC gain from output disturbances to measured outputs assuming constraints are inactive at steady state
Description
Use this function to calculate the steady state output sensitivity of the closed loop. A zero value means that the measured plant output can track the desired output reference setpoint.
dcgain = cloffset(mpcobj)dcgain. mpcobj is the MPC
object specifying the controller for which the closed-loop gain is calculated.
Computing the Effect of Output Disturbances
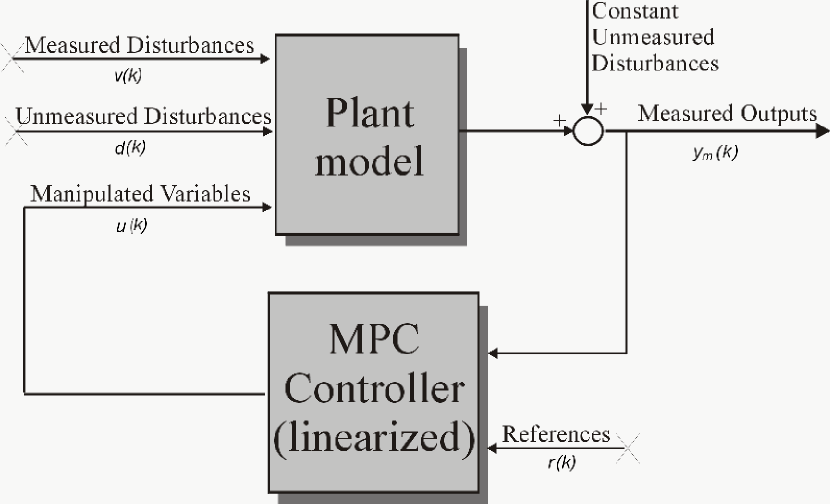
Relying on the superposition of effects principle, the gain is computed by zeroing references, measured disturbances, and unmeasured input disturbances.
Examples
Input Arguments
Output Arguments
Version History
Introduced before R2006a