filter
Modify frequency content of timeseries objects
Description
tsout = filter(
applies the rational
transfer function filter b(z−1)/a(z−1) to the uniformly-spaced data in the tsin,b,a)timeseries
object tsin. The numerator b and denominator
a are vectors containing the transfer function
coefficients.
Examples
This example applies the following transfer function to a set of data:
Create a timeseries object from the matrix count in count.dat.
load count.dat
tsin = timeseries(count(:,1),[1:24]);Enter the coefficients for the denominator and numerator of the transfer function. Order the coefficients in ascending powers of to represent and .
a = [1 0.2]; b = [2 3];
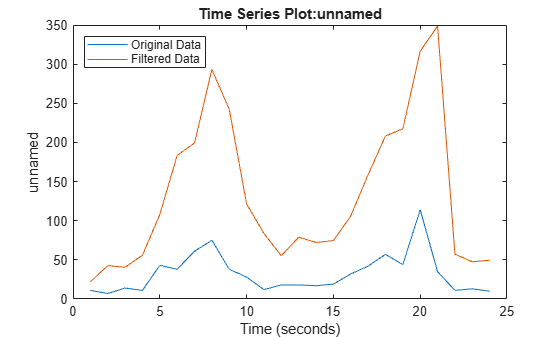
Apply the transfer function using filter, and compare the original data to the filtered data.
tsout = filter(tsin,b,a); plot(tsin) hold on plot(tsout) legend('Original Data','Filtered Data','Location','NorthWest')
Input Arguments
More About
References
[1] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1999.
Version History
Introduced before R2006a