bvpinit
Form initial guess for boundary value problem solver
Description
solinit = bvpinit(sol,[anew bnew])[anew bnew],
where sol is a solution structure obtained from
bvp4c or bvp5c. The new interval [anew
bnew] must be larger than the previous interval on which sol
is defined. The previous solution sol is extrapolated to the new
interval.
solinit = bvpinit(___,parameters)
Examples
Create an initial guess of the solution to a BVP, solve the BVP with bvp4c, and then extend the solution to a new domain.
Forming a good initial guess of the solution to a BVP problem is perhaps the most difficult part of solving the problem. BVP solutions are not necessarily unique, so the initial guess can be the deciding factor in which of many solutions the solver returns. The initial guess should satisfy the boundary conditions, and the behavior inbetween should reflect your general expectations about the problem (whether the solution oscillates, is a simple linear function, and so on...).
Consider the differential equation
.
The equation is subject to the boundary conditions
.
The function that encodes the equation as a first-order system is
function dydx = bvpfun(x,y) dydx = [y(2) -y(1)]; end
Similarly, the function that encodes the boundary conditions is
function res = bcfun(ya,yb) res = [ya(1) yb(1)]; end
You either can include the required functions as local functions at the end of a file (as done here), or you can save them as separate, named files in a directory on the MATLAB® path.
Initial Guess with Function Handle
You reasonably can expect the solution to the equation to be oscillatory, so sine and cosine functions are a good initial guess of the behavior of the solution and its derivative between the fixed boundary points.
function y = guess(x) y = [sin(x) cos(x)]; end
Create a solution structure using 10 equally spaced mesh points in the domain and the initial guess function.
xmesh = linspace(0,pi,10); solinit = bvpinit(xmesh,@guess);
Solve BVP
Call bvp4c with the ode function, boundary conditions, and solution guess. Plot the result.
sol = bvp4c(@bvpfun, @bcfun, solinit);
plot(sol.x,sol.y,'-o')
Local Functions
Listed here are the local helper functions that the BVP solver bvp4c calls to calculate the solution. Alternatively, you can save these functions as their own files in a directory on the MATLAB path.
function dydx = bvpfun(x,y) % equation being solved dydx = [y(2) -y(1)]; end %------------------------------------------- function res = bcfun(ya,yb) % boundary conditions res = [ya(1) yb(1)]; end %------------------------------------------- function y = guess(x) % guess at solution behavior y = [sin(x) cos(x)]; end %-------------------------------------------
Solve a BVP over an initial interval, and then iteratively extend the interval using each solution as the initial guess for the next interval.
Consider the equation
.
As a first-order system, the equation becomes a system of two equations
,
.
The equation is initially defined on the interval and is subject to the boundary conditions
,
.
The function that encodes the equation as a first-order system is
function dydx = bvpfun(x,y) dydx = [y(2) y(1)]; end
Similarly, the function that encodes the boundary conditions is
function res = bcfun(ya,yb) res = [ya(1) yb(1)-1]; end
You either can include the required functions as local functions at the end of a file (as done here), or you can save them as separate, named files in a directory on the MATLAB path.
Initial Guess
Use an exponential function as the initial guess for the solution. Since the equation has two solution components, write an initial guess function of the form y = guess(x) that returns a vector.
function y = guess(x) y = [exp(x) exp(x)]; end
A mesh of five points is sufficient to capture the behavior of the guess function.
xmesh = linspace(0,3,5); solinit = bvpinit(xmesh,@guess);
Solve Equation
Solve the equation in the initial interval and plot the results for .
sol = bvp4c(@bvpfun, @bcfun, solinit);
plot(sol.x(1,:),sol.y(1,:),'-o')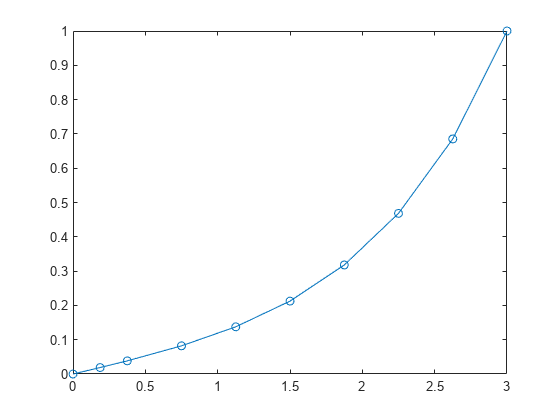
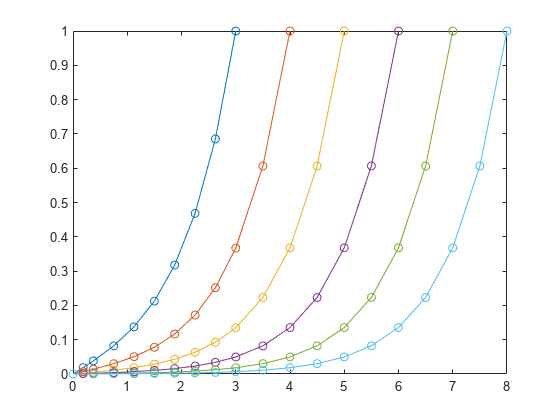
Extend Interval
Now, use bvpinit to extend the interval of integration in a loop, solving and plotting each new problem. In each iteration, form the initial guess using the previous solution sol extrapolated to the new interval [0 k]. In each new problem, bvp4c enforces the boundary conditions at the new boundaries [0 k].
hold on for k = 4:8 solinit = bvpinit(sol,[0 k]); sol = bvp4c(@bvpfun, @bcfun, solinit); plot(sol.x(1,:),sol.y(1,:),'-o') end
This example shows a simplified version of continuation, a useful technique to solve BVPs by breaking the problem down into smaller intervals or simpler problems. For more examples of this technique, see:
Local Functions
Listed here are the local helper functions that the BVP solver bvp4c calls to calculate the solution. Alternatively, you can save these functions as their own files in a directory on the MATLAB path.
function dydx = bvpfun(x,y) % equation being solved dydx = [y(2) y(1)]; end %------------------------------------------- function res = bcfun(ya,yb) % boundary conditions res = [ya(1) yb(1)-1]; end %------------------------------------------- function y = guess(x) % guess at solution behavior y = [exp(x) exp(x)]; end %-------------------------------------------
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced before R2006a