pcmapsegmatch
Map of segments and features for localization and loop closure detection
Description
The pcmapsegmatch object creates a map of segments and features,
and uses the segment matching (SegMatch [1]) algorithm for place recognition.
This segment matching approach is robust to dynamic obstacles and reliable on large scale
environments. The object stores the features, and segments, and their corresponding view IDs.
Use the view IDs to link the features to a view in the point cloud view set object, pcviewset, for map
building. pcmapsegmatch implements feature matching using eigenvalue-based
features. It uses the Euclidean distance between segment features to find segment
matches.
Creation
Description
sMap = pcmapsegmatchpcmapsegmatch object. Use the addView object
function to add views and their corresponding segments and features to the map.
sMap = pcmapsegmatch('CentroidDistance',dist)dist, are not added to the map.
dist is specified as a positive scalar with a default value of
0.1.
Properties
Object Functions
addView | Add view to map |
deleteView | Delete view from map |
findView | Retrieve feature and segment indices corresponding to map view |
hasView | Check if view is in the map |
deleteSegments | Delete all segments in map |
findPose | Find absolute pose in map that aligns segment matches |
updateMap | Update centroid and point cloud segment locations in map |
selectSubmap | Select submap within map |
isInsideSubmap | Check if query position is inside selected submap |
show | Visualize the point cloud segments in the map |
Examples
Load a map of segments and features from a MAT file into the workspace. The point cloud data in the map has been collected using the Simulation 3D Lidar (UAV Toolbox) block.
data = load('segmatchMapFullParkingLot.mat');
sMap = data.segmatchMapFullParkingLot;Load point cloud scans from a MAT file.
data = load('fullParkingLotData.mat');
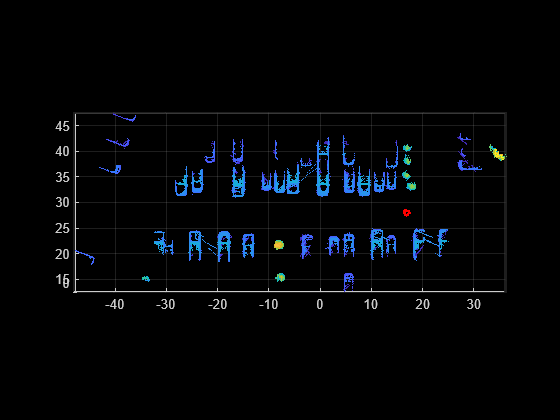
ptCloudScans = data.fullParkingLotData;Display the map of segments.
ax = show(sMap);
Change the viewing angle to top-view.
view(2) pause(0.2)
Set the radius for selecting a cylindrical neighborhood.
outerCylinderRadius = 20; innerCylinderRadius = 3;
Set the threshold parameters for segmentation.
distThreshold = 0.5; angleThreshold = 180;
Set the size and submap threshold parameters for the selected submap.
sz = [65 30 20]; submapThreshold = 10;
Set the radius parameter for visualization.
radius = 0.5;
Segment each point cloud and localize by finding segment matches.
for n = 1:numel(ptCloudScans) ptCloud = ptCloudScans(n); % Segment and remove the ground plane. groundPtsIdx = segmentGroundFromLidarData(ptCloud,'ElevationAngleDelta',11); ptCloud = select(ptCloud,~groundPtsIdx,'OutputSize','full'); % Select the cylindrical neighborhood. dists = sqrt(ptCloud.Location(:,:,1).^2 + ptCloud.Location(:,:,2).^2); cylinderIdx = dists <= outerCylinderRadius & dists > innerCylinderRadius; ptCloud = select(ptCloud,cylinderIdx,'OutputSize','full'); % Segment the point cloud. labels = segmentLidarData(ptCloud,distThreshold,angleThreshold,'NumClusterPoints',[50 5000]); % Extract features from the point cloud. [features,segments] = extractEigenFeatures(ptCloud,labels); % Localize by finding the absolute pose in the map that aligns the segment matches. [absPoseMap,~,inlierFeatures,inlierSegments] = findPose(sMap,features,segments); if isempty(absPoseMap) continue; end % Display the position estimate in the map. poseTranslation = absPoseMap.Translation; pos = [poseTranslation(1:2) radius]; showShape('circle',pos,'Color','r','Parent',ax); pause(0.2) % Determine if the selected submap needs to be updated. [isInside,distToEdge] = isInsideSubmap(sMap,poseTranslation); needSelectSubmap = ~isInside ... % Current pose is outside submap || any(distToEdge(1:2) < submapThreshold) ... % Current pose is close to submap edge || n == 1; % 1st time localizing using whole map % Select a new submap. if needSelectSubmap sMap = selectSubmap(sMap,poseTranslation,sz); end end
% Visualize the last segment matches.
figure;
pcshowMatchedFeatures(inlierSegments(:,1),inlierSegments(:,2),inlierFeatures(:,1),inlierFeatures(:,2))
References
[1] Dube, Renaud, Daniel Dugas, Elena Stumm, Juan Nieto, Roland Siegwart, and Cesar Cadena. “SegMatch: Segment Based Place Recognition in 3D Point Clouds.” In 2017 IEEE International Conference on Robotics and Automation (ICRA), 5266–72. Singapore, Singapore: IEEE, 2017. https://doi.org/10.1109/ICRA.2017.7989618.
Version History
Introduced in R2021a
See Also
Functions
segmentLidarData|segmentGroundFromLidarData|pcsegdist|pcshowMatchedFeatures|extractEigenFeatures