imextendedmin
Extended-minima transform
Description
BW = imextendedmin(I,H)I, which
is the regional minima of the H-minima transform.
Regional minima are connected components of pixels with a constant intensity value, and whose external boundary pixels all have a higher value. The H-minima transform suppresses all regional minima with a depth less than or equal to
H.The extended-minima transform, which is the regional minima of the H-minima transform, identifies regional minima with a depth greater than
H.
Use the extended-minima transform to detect dark regions in an image while ignoring small intensity variations.
Examples
Read an image into the workspace.
I = imread("threads.png");Visualize the image. Observe that the threads in the image represent regions that are significantly darker than their surroundings.
figure imshow(I)

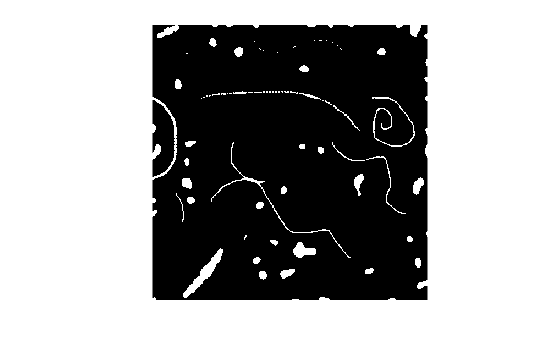
Calculate the extended-minima transform with a low value for H, the value that indicates the minimum depth of regional minima.
H = 1; BWlow = imextendedmin(I,H);
Visualize the transformed image. Observe that the transform detects insignificant variations because the specified minimum depth of regional minima is low.
figure imshow(BWlow)
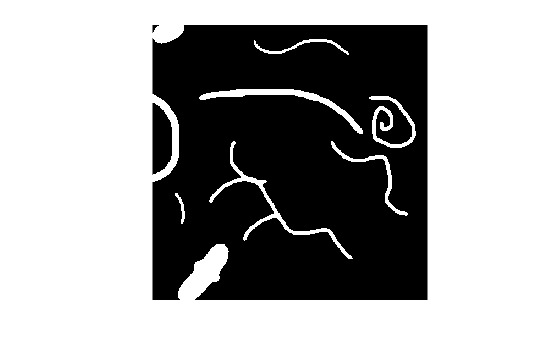
Calculate the extended-minima transform with a high value for H.
H = 20; BWhigh = imextendedmin(I,H);
Visualize the transformed image. Observe that the transform ignores small intensity variations and detects entire regions that are significantly darker than their surroundings because the specified minimum depth of regional minima is high.
figure imshow(BWhigh)
Input Arguments
Input image, specified as a numeric array of any dimension.
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Minimum depth of regional minima, specified as a nonnegative scalar.
Specify a large value for H to identify only those
regions in the image that are significantly darker than their
surroundings.
Example: 80
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Pixel connectivity, specified as one of the values in this table. The
default connectivity is 8 for 2-D images, and
26 for 3-D images.
Value | Meaning | |
|---|---|---|
Two-Dimensional Connectivities | ||
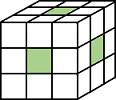
| Pixels are connected if their edges touch. The neighborhood of a pixel are the adjacent pixels in the horizontal or vertical direction. |
Current pixel is shown in gray. |
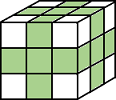
| Pixels are connected if their edges or corners touch. The neighborhood of a pixel are the adjacent pixels in the horizontal, vertical, or diagonal direction. |
Current pixel is shown in gray. |
Three-Dimensional Connectivities | ||
| Pixels are connected if their faces touch. The neighborhood of a pixel are the adjacent pixels in:
|
Current pixel is shown in gray. |
| Pixels are connected if their faces or edges touch. The neighborhood of a pixel are the adjacent pixels in:
|
Current pixel is center of cube. |
| Pixels are connected if their faces, edges, or corners touch. The neighborhood of a pixel are the adjacent pixels in:
|
Current pixel is center of cube. |


For higher dimensions, imextendedmin uses the default
value conndef(ndims(I),"maximal")
Data Types: single | double | int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64
Output Arguments
References
[1] Soille, P. Morphological Image Analysis: Principles and Applications. Springer-Verlag, 1999, pp. 170-171.
Extended Capabilities
Version History
Introduced before R2006a
See Also
conndef | imextendedmax | imhmin | imreconstruct | imregionalmin