Transfer Function Models
Transfer function models describe the relationship between the inputs and outputs of a system using a ratio of polynomials. The model order is equal to the order of the denominator polynomial. The roots of the denominator polynomial are referred to as the model poles. The roots of the numerator polynomial are referred to as the model zeros.
The parameters of a transfer function model are its poles, zeros, and transport delays.
In continuous time, a transfer function model has the following form:
Here, Y(s), U(s), and E(s) represent the Laplace transforms of the output, input, and noise, respectively. num(s) and den(s) represent the numerator and denominator polynomials that define the relationship between the input and the output.
For more information, see What Are Transfer Function Models?
Apps
| System Identification | Identify models of dynamic systems from measured data |
Functions
Topics
Transfer Function Model Basics
- What Are Transfer Function Models?
Transfer function models describe the relationship between the inputs and outputs of a system using a ratio of polynomials. - Estimate Transfer Function Models in the System Identification App
Use the app to set model configuration and estimation options for estimating a transfer function model. - Estimate Transfer Function Models at the Command Line
General workflow for estimating transfer function models at the command line. - Data Supported by Transfer Function Models
Characteristics of estimation data for transfer function identification.
Estimate Transfer Function Models
- Estimate Transfer Function Models by Specifying Number of Poles
This example shows how to identify a transfer function containing a specified number of poles for given data. - Estimate Transfer Function Models with Transport Delay to Fit Given Frequency-Response Data
This example shows how to identify a transfer function to fit a given frequency response data (FRD) containing additional phase roll off induced by input delay. - Estimate Transfer Function Models with Prior Knowledge of Model Structure and Constraints
This example shows how to estimate a transfer function model when the structure of the expected model is known and apply constraints to the numerator and denominator coefficients. - Estimate Transfer Functions with Delays
This example shows how to estimate transfer function models with I/O delays. - Estimate Transfer Function Models with Unknown Transport Delays
This example shows how to estimate a transfer function model with unknown transport delays and apply an upper bound on the unknown transport delays.
Frequency Domain Troubleshooting
- Troubleshoot Frequency-Domain Identification of Transfer Function Models
Improve frequency-domain model estimation by preprocessing data and applying frequency-dependent weighting filters.
Model Initialization and Structure Parameters
- Transfer Function Structure Specification
Specify the values and constraints for the numerator, denominator and transport delays. - Specifying Initial Conditions for Iterative Estimation of Transfer Functions
Specify how initial conditions are handled during model estimation in the app and at the command line.
Featured Examples
Estimating Transfer Function Models for a Heat Exchanger
Estimate a transfer function from measured signal data.
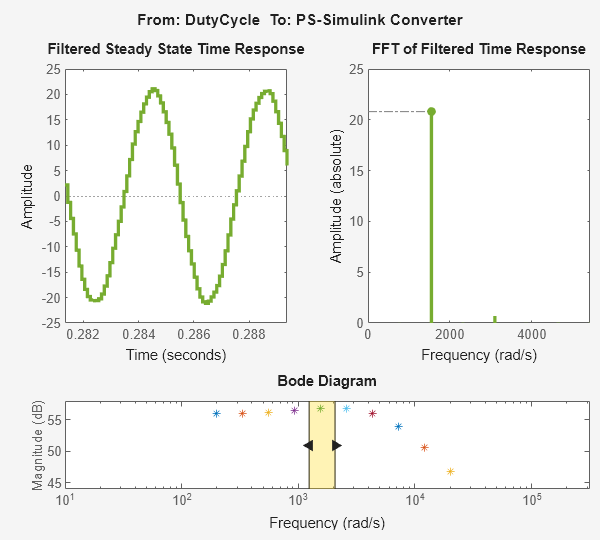
Estimating Transfer Function Models for a Boost Converter
Estimate a transfer function from frequency response data.