predict
Predict identified model K-step-ahead output
Syntax
Description
This predict command computes the K-step-ahead output of
an identified model using measured input-output data. To identify the model, you first
collect all the input-output data and then estimate the model parameters offline. To
perform online state estimation of a nonlinear system using real-time data, use the
predict command for extended and unscented
Kalman filters instead.
yp = predict(sys,data,K)sys, K steps
ahead using the measured input-output data.
predict command predicts the output response
over the time span of measured data. In contrast, forecast performs prediction into the
future in a time range beyond the last instant of measured data. Use predict to
validate sys over the time span of measured data.
data can be a timetable, a comma-separated input/output
matrix pair, or an iddata object.
predict(
plots the predicted output. Use with any of the previous input argument
combinations. To change display options in the plot, right-click the plot to
access the context menu. For more details about the menu, see Tips.sys,data,K,___)
You can also plot the predicted model response using the compare command. The compare command
compares the prediction results with observed data and displays a
quantitative goodness of fit.
Examples
Simulate time-series data.
init_sys = idpoly([1 -0.99],[],[1 -1 0.2]);
opt = simOptions('AddNoise',true);
u = iddata([],zeros(400,0),1);
data = sim(init_sys,u,opt);data is an iddata object containing the simulated response data of a time series model.
Estimate an ARMAX model by using data as estimation data.
na = 1; nb = 2; sys = armax(data(1:200),[na nb]);
Predict the output of the model using a prediction horizon of 4.
K = 4; yp = predict(sys,data,K);
yp is an iddata object. The predicted output is returned in the OutputData property of the object.
Compare the predicted and estimated data outputs.
plot(data(201:400),yp(201:400)); legend('Estimation data','Predicted data');
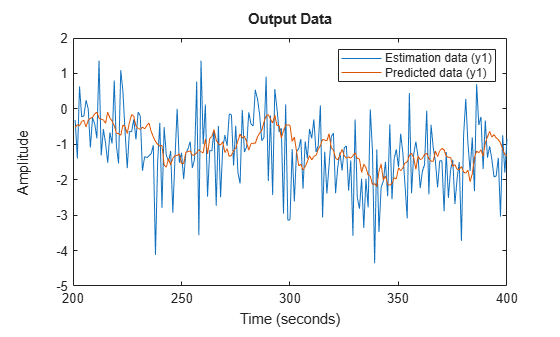
Alternatively, to plot the predicted response and estimation data, use compare(sys,data,K).
Load the estimation data.
load sdata1 tt1; data = tt1;
Estimate an ARX model of order [2 2 1].
sys1 = arx(data,[2 2 1]);
Estimate a transfer function with 2 poles.
sys2 = tfest(data,2);
Create a predict option set to specify zero initial conditions for prediction.
opt = predictOptions('InitialCondition','z');
Plot the predicted outputs for the estimated models. Use the specified prediction option set, opt, and specify prediction horizon as 10. Specify line styles for plotting the predicted output of each system.
predict(sys1,'r--',sys2,'b',data,10,opt);
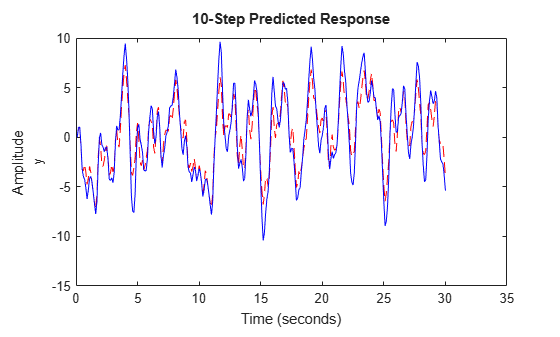
To change the display options, right-click the plot to access the context menu. For example, to view the estimation data, select Show Validation Data from the context menu. To view the prediction error, select Prediction Error Plot.
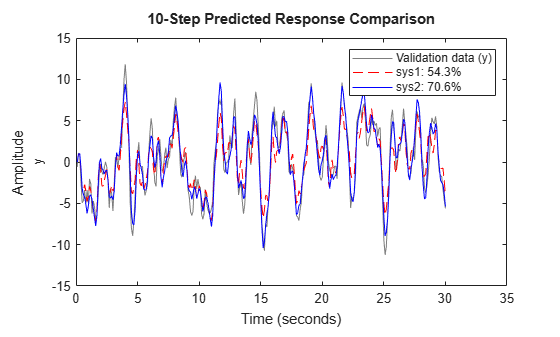
You can also plot the predicted response using the compare command. To do so, first create an option set for compare to specify the use of zero initial conditions.
opt = compareOptions('InitialCondition','z'); compare(data,sys1,'r--',sys2,'b',10,opt);
Use estimation data to estimate a model, and then compute the predicted model output and predictor model using the predict command. Simulate the predictor model to reproduce the predicted output.
Load estimation data.
load sdata3 umat3 ymat3 Ts
Estimate a polynomial model from the data.
sys = polyest(umat3,ymat3,[2 2 2 0 0 1]);
Predict the system response using prediction horizon 4.
K = 4; [yp,ic,sysp] = predict(sys,umat3,ymat3,K);
yp is the predicted model response, ic contains the estimated initial conditions, and sysp is the predictor model.
Simulate the predictor model with inputs [data.OutputData,data.InputData] and initial conditions ic.
opt = simOptions; opt.InitialCondition = ic; ys = sim(sysp,[ymat3,umat3],opt);
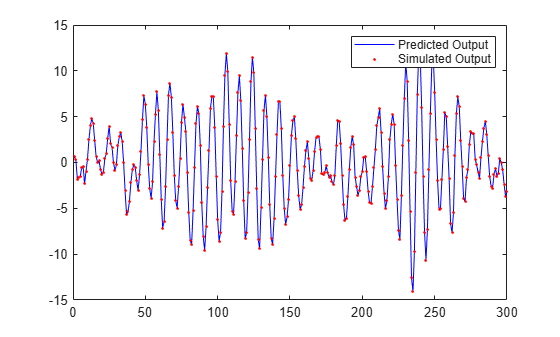
Plot the predicted and simulated outputs.
ns = size(ys,1); t = [1:Ts:ns]'; plot(t,yp,'b',t,ys,'.r'); legend('Predicted Output','Simulated Output')
Incorporate initial conditions that you obtained previously into your model prediction.
Load the data.
load iddata1ic z1i
Specify the ARMAX estimation option to estimate the initial state.
estimOpt = armaxOptions('InitialCondition','estimate');
Estimate an ARMAX model and return an initialCondition object ic that encapsulates the initial conditions in state-space form.
na = 2; nb = 2; nc = 2; nk = 1; [sys,ic] = armax(z1i,[na nb nc nk],estimOpt);
Specify the initial conditions for prediction.
predictOpt = predictOptions('InitialCondition',ic);Predict the model and obtain the model response. Plot the response y with the measured data.
y = predict(sys,z1i,predictOpt); plot(z1i,y) legend("show",Interpreter="none")
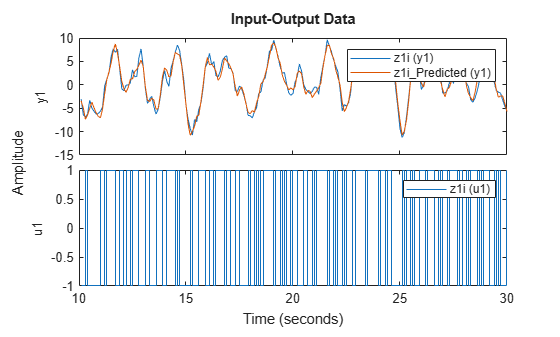
The measured and predicted responses show good agreement at the start of the prediction.
Perform model prediction using historical data to specify initial conditions. You first predict using the predict command and specify the historical data using the predictOptions option set. You then reproduce the predicted response by manually mapping the historical data to initial states.
Load a two-input, one-output dataset.
load iddata7 z7
Identify a fifth-order state-space model using the data.
sys = n4sid(z7,5);
Split the dataset into two parts.
zA = z7(1:15); zB = z7(16:end);
Suppose that you want to compute the 10-step-ahead prediction of the response of the identified system for data zB. For initial conditions, use the signal values in zA as the historical record. That is, the input and output values for the time immediately preceding data in zB.
IO = struct('Input',zA.InputData,'Output',zA.OutputData); opt = predictOptions('InitialCondition',IO);
Generate the 10-step-ahead prediction for data zB using the specified initial conditions and predict.
[yp,x0,Predictor] = predict(sys,zB,10,opt);
yp is the predicted model response, x0 are the initial states corresponding to the predictor model Predictor. You can simulate Predictor using x0 as initial conditions to reproduce yp.OutputData.
Now reproduce the output by manually mapping the historical data to initial states. To do so, minimize 1-step prediction errors over the time span of zA.
x0est = data2state(sys,zA);
x0est contains the values of the five states of sys at the time instant immediately after the most recent data sample in zA.
The Predictor has more states than the original system due to the 10-step prediction horizon. Specify the additional states induced by the horizon to zero initial values, and then append x0est.
x0Predictor = zeros(order(Predictor),1); x0Predictor(end-4:end) = x0est;
Simulate the predictor using [zB.OutputData,zB.InputData] as the input signal and x0Predictor as initial conditions.
uData = [zB.OutputData,zB.InputData]; % signals required for prediction
[ysim,t,xsim] = lsim(Predictor,uData,[],x0Predictor);Plot the predicted output of the predict command yp.OutputData and the manually computed results ysim.
plot(t,yp.OutputData,t,ysim, '.')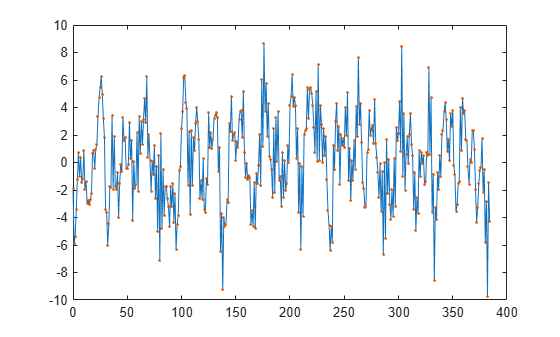
ysim is the same as yp.OutputData.
Input Arguments
Output Arguments
Tips
Right-clicking the plot of the predicted output opens the context menu, where you can access the following options:
Systems — Select systems to view predicted response. By default, the response of all systems is plotted.
Data Experiment — For multi-experiment data only. Toggle between data from different experiments.
Characteristics — View the following data characteristics:
Peak Value — View the absolute peak value of the data. Applicable for time–domain data only.
Peak Response — View peak response of the data. Applicable for frequency-response data only.
Mean Value — View mean value of the data. Applicable for time–domain data only.
Show — For frequency-domain and frequency-response data only.
Magnitude — View magnitude of frequency response of the system.
Phase — View phase of frequency response of the system.
Show Validation Data — Plot data used to predict the model response.
I/O Grouping — For datasets containing more than one input or output channel. Select grouping of input and output channels on the plot.
None — Plot input-output channels in their own separate axes.
All — Group all input channels together and all output channels together.
I/O Selector — For datasets containing more than one input or output channel. Select a subset of the input and output channels to plot. By default, all output channels are plotted.
Grid — Add grids to the plot.
Normalize — Normalize the y-scale of all data in the plot.
Full View — Return to full view. By default, the plot is scaled to full view.
Prediction Horizon — Set the prediction horizon, or choose simulation.
Initial Condition — Specify handling of initial conditions. Not applicable for frequency-response data.
Specify as one of the following:
Estimate — Treat the initial conditions as estimation parameters.
Zero — Set all initial conditions to zero.
Absorb delays and estimate — Absorb nonzero delays into the model coefficients and treat the initial conditions as estimation parameters. Use this option for discrete-time models only.
Predicted Response Plot — Plot the predicted model response. By default, the response plot is shown.
Prediction Error Plot — Plot the error between the model response and prediction data.
Properties — Open the Property Editor dialog box to customize plot attributes.