bj
Estimate Box-Jenkins polynomial model using time-domain data
Syntax
Description
Box-Jenkins (BJ) models are a special configuration of polynomial models that provide completely independent parameterization for the dynamics and noise using rational polynomial functions. BJ models, which are always discrete-time models, can be estimated only from time-domain data. Use BJ models when the noise is primarily a measurement disturbance rather than an input disturbance. The BJ structure provides additional flexibility for modeling the noise.
Estimate Box-Jenkins Model
sys = bj(tt,[nb
nc nd nf nk])sys using the data
contained in the variables of timetable tt. The software
uses the first Nu variables as inputs and the next
Ny variables as outputs, where Nu and
Ny are determined from the dimensions of the specified
polynomial orders.
sys is represented by the equation
Here, y(t) is the output, u(t) is the input, and e(t) is the error.
The components of [nb nc nd nf nk] define the orders of
the polynomials used for estimation. For more information about the Box-Jenkins
model structure, see Box-Jenkins Model Structure.
To select specific input and output channels from tt, use
name-value syntax to set 'InputName' and
'OutputName' to the corresponding timetable variable
names.
sys = bj(u,y,[nb nc nd nf nk])u,y. The software assumes that the
data sample time is 1 second. To change the sample time, set
Ts using name-value syntax.
sys = bj(data,[nb nc nd nf nk])iddata object
data. Use this syntax especially when you want to take
advantage of the additional information, such as data sample time or experiment
labeling, that data objects provide.
sys = bj(___, Name,Value)
Configure Initial Parameters
Specify Additional Estimation Options
Return Estimated Initial Conditions
[
returns the estimated initial conditions as an sys,ic] = bj(___)initialCondition object. Use this syntax if you plan to simulate
or predict the model response using the same estimation input data and then
compare the response with the same estimation output data. Incorporating the
initial conditions yields a better match during the first part of the
simulation.
Examples
Estimate the parameters of a single-input, single-output Box-Jenkins model from measured data.
load sdata1 tt1; nb = 2; nc = 2; nd = 2; nf = 2; nk = 1; sys = bj(tt1,[nb nc nd nf nk]);
sys is a discrete-time idpoly model with estimated coefficients. The order of sys is as described by nb, nc, nd, nf, and nk.
Compare the model output to the estimation data.
compare(sys,tt1)
Use getpvec to obtain the estimated parameters and getcov to obtain the covariance associated with the estimated parameters.
Estimate the parameters of a multi-input, single-output Box-Jenkins model from measured data.
Load the data tt8, which is in the form of a timetable containing three input channels and one output channel. Separate tt8 into estimation and validation portions.
load sdata8.mat tt8 tt8e = tt8(1:250,:); tt8v = tt8(251:end,:);
Specify the orders and delays. Then, estimate the model sys.
nb = [2 1 1]; nc = 1; nd = 1; nf = [2 1 2] + 1; nk = [1 0 2]; sys=bj(tt8e,[nb nc nd nf nk]);
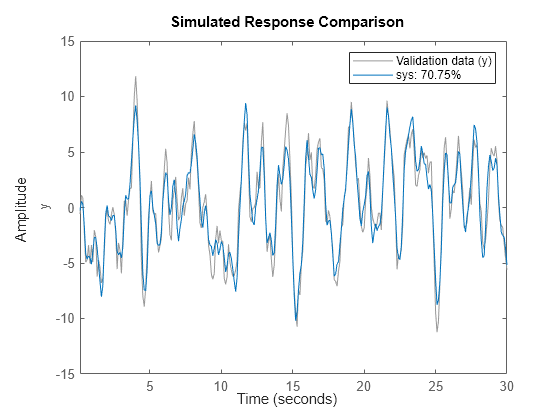
Compare the output of sys with the validation data.
compare(tt8v,sys)

Estimate a regularized BJ model by converting a regularized ARX model.
Load data.
load regularizationExampleData.mat m0simdata;
Estimate an unregularized BJ model of order 30.
m1 = bj(m0simdata(1:150),[15 15 15 15 1]);
Estimate a regularized BJ model by determining Lambda value by trial and error.
opt = bjOptions; opt.Regularization.Lambda = 1; m2 = bj(m0simdata(1:150),[15 15 15 15 1],opt);
Obtain a lower-order BJ model by converting a regularized ARX model followed by order reduction.
opt1 = arxOptions; [L,R] = arxRegul(m0simdata(1:150),[30 30 1]); opt1.Regularization.Lambda = L; opt1.Regularization.R = R; m0 = arx(m0simdata(1:150),[30 30 1],opt1); mr = idpoly(balred(idss(m0),7));
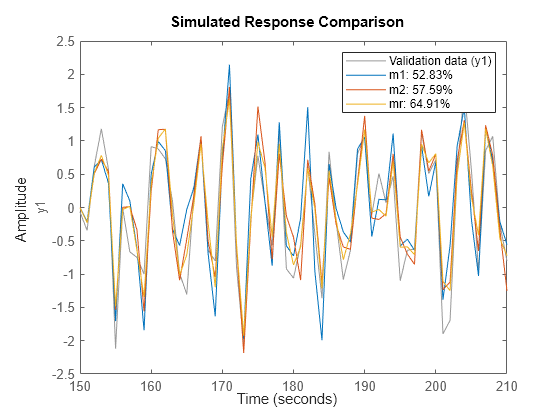
Compare the model outputs against data.
opt2 = compareOptions('InitialCondition','z'); compare(m0simdata(150:end),m1,m2,mr,opt2);
Estimate the parameters of a single-input, single-output Box-Jenkins model while configuring some estimation options.
Generate estimation data.
B = [0 1 0.5]; C = [1 -1 0.2]; D = [1 1.5 0.7]; F = [1 -1.5 0.7]; sys0 = idpoly(1,B,C,D,F,0.1); e = randn(200,1); u = idinput(200); y = sim(sys0,[u e]);
data is a single-input, single-output data set created by simulating a known model.
Estimate initial Box-Jenkins model.
nb = 2; nc = 2; nd = 2; nf = 2; nk = 1; init_sys = bj(u,y,[2 2 2 2 1]);
Create an estimation option set to refine the parameters of the estimated model.
opt = bjOptions;
opt.Display = 'on';
opt.SearchOptions.MaxIterations = 50;opt is an estimation option set that configures the estimation to iterate 50 times at most and display the estimation progress.
Re-estimate the model parameters using the estimation option set.
sys = bj(u,y,init_sys,opt);
sys is estimated using init_sys for the initial parameterization for the polynomial coefficients.
To view the estimation result, enter sys.Report.
Estimate a multi-input, multi-output Box-Jenkins model from estimated data.
Load measured data.
load iddata1 z1 load iddata2 z2 data = [z1 z2(1:300)];
data contains the measured data for two inputs and two outputs.
Estimate the model.
nb = [2 2; 3 4]; nc = [2;2]; nd = [2;2]; nf = [1 0; 2 2]; nk = [1 1; 0 0]; sys = bj(data,[nb nc nd nf nk]);
The polynomial order coefficients contain one row for each output.
sys is a discrete-time idpoly model with two inputs and two outputs.
Load the data.
load iddata1ic z1i
Estimate a second-order Box-Jenkins model sys and return the initial conditions in ic.
nb = 2; nc = 2; nd = 2; nf = 2; nk = 1; [sys,ic] = bj(z1i,[nb nc nd nf nk]); ic
ic =
initialCondition with properties:
A: [4×4 double]
X0: [4×1 double]
C: [0.8744 0.5426 0.4647 -0.5285]
Ts: 0.1000
ic is an initialCondition object that encapsulates the free response of sys, in state-space form, to the initial state vector in X0. You can incorporate ic when you simulate sys with the z1i input signal and compare the response with the z1i output signal.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Alternatives
To estimate a continuous-time model, use:
References
[1] Ljung, L. System Identification: Theory for the User, Upper Saddle River, NJ, Prentice-Hall PTR, 1999.