How the Genetic Algorithm Works
Outline of the Algorithm
The following outline summarizes how the genetic algorithm works:
The algorithm begins by creating a random initial population.
The algorithm then creates a sequence of new populations. At each step, the algorithm uses the individuals in the current generation to create the next population. To create the new population, the algorithm performs the following steps:
Scores each member of the current population by computing its fitness value. These values are called the raw fitness scores.
Scales the raw fitness scores to convert them into a more usable range of values. These scaled values are called expectation values.
Selects members, called parents, based on their expectation.
Some of the individuals in the current population that have lower fitness are chosen as elite. These elite individuals are passed to the next population.
Produces children from the parents. Children are produced either by making random changes to a single parent—mutation—or by combining the vector entries of a pair of parents—crossover.
Replaces the current population with the children to form the next generation.
The algorithm stops when one of the stopping criteria is met. See Stopping Conditions for the Algorithm.
The algorithm takes modified steps for linear and integer constraints. See Integer and Linear Constraints.
The algorithm is further modified for nonlinear constraints. See Nonlinear Constraint Solver Algorithms for Genetic Algorithm.
Initial Population
The algorithm begins by creating a random initial population, as shown in the following figure.
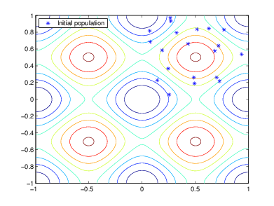
In this example, the initial population contains 20 individuals. Note that
all the individuals in the initial population lie in the upper-right quadrant of the
picture, that is, their coordinates lie between 0 and 1. For this example, the
InitialPopulationRange option is [0;1].
If you know approximately where the minimal point for a function lies, you should set
InitialPopulationRange so that the point lies near the middle
of that range. For example, if you believe that the minimal point for Rastrigin's
function is near the point [0 0], you could set
InitialPopulationRange to be [-1;1].
However, as this example shows, the genetic algorithm can find the minimum even with
a less than optimal choice for InitialPopulationRange.
Creating the Next Generation
At each step, the genetic algorithm uses the current population to create the children that
make up the next generation. The algorithm selects a group of individuals in the
current population, called parents, who contribute their
genes—the entries of their vectors—to their
children. The algorithm usually selects individuals that have better fitness values
as parents. You can specify the function that the algorithm uses to select the
parents in the SelectionFcn option. See Selection Options.
The genetic algorithm creates three types of children for the next generation:
Elite children are the individuals in the current generation with the best fitness values. These individuals automatically survive to the next generation.
Crossover children are created by combining the vectors of a pair of parents.
Mutation children are created by introducing random changes, or mutations, to a single parent.
The following schematic diagram illustrates the three types of children.
Mutation and Crossover explains how to specify the number of children of each type that the algorithm generates and the functions it uses to perform crossover and mutation.
The following sections explain how the algorithm creates crossover and mutation children.
Crossover Children
The algorithm creates crossover children by combining pairs of parents in the current population. At each coordinate of the child vector, the default crossover function randomly selects an entry, or gene, at the same coordinate from one of the two parents and assigns it to the child. For problems with linear constraints, the default crossover function creates the child as a random weighted average of the parents.
Mutation Children
The algorithm creates mutation children by randomly changing the genes of individual parents. By default, for unconstrained problems the algorithm adds a random vector from a Gaussian distribution to the parent. For bounded or linearly constrained problems, the child remains feasible.
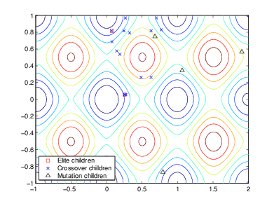
The following figure shows the children of the initial population, that is, the population at the second generation, and indicates whether they are elite, crossover, or mutation children.
Plots of Later Generations
The following figure shows the populations at iterations 60, 80, 95, and 100.
|
|
|
|
|
|
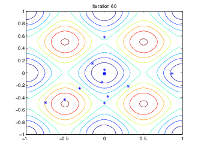
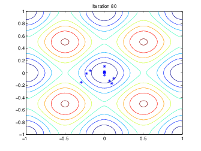
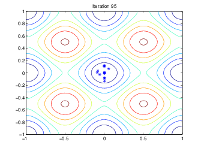
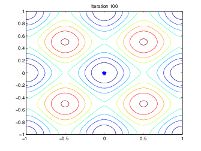
As the number of generations increases, the individuals in the
population get closer together and approach the minimum point [0
0].
Stopping Conditions for the Algorithm
The genetic algorithm uses the following options to determine when to stop. See the default
values for each option by running opts =
optimoptions("ga").
MaxGenerations— The algorithm stops when the number of generations reachesMaxGenerations.MaxTime— The algorithm stops after running for an amount of time in seconds equal toMaxTime.FitnessLimit— The algorithm stops when the value of the fitness function for the best point in the current population is less than or equal toFitnessLimit.MaxStallGenerations— The algorithm stops when the average relative change in the fitness function value overMaxStallGenerationsis less thanFunction tolerance.MaxStallTime— The algorithm stops if there is no improvement in the objective function during an interval of time in seconds equal toMaxStallTime.FunctionTolerance— The algorithm runs until the average relative change in the fitness function value overMaxStallGenerationsis less thanFunction tolerance.ConstraintTolerance— TheConstraintToleranceis not used as stopping criterion. It is used to determine the feasibility with respect to nonlinear constraints. Also,max(sqrt(eps),ConstraintTolerance)determines feasibility with respect to linear constraints.
The algorithm stops as soon as any one of these conditions is met.
Selection
The selection function chooses parents for the next generation based on their scaled values
from the fitness scaling function. The scaled fitness values are called the
expectation values. An individual can be selected more than once as a parent, in
which case it contributes its genes to more than one child. The default selection
option, @selectionstochunif, lays out a line in which each parent
corresponds to a section of the line of length proportional to its scaled value. The
algorithm moves along the line in steps of equal size. At each step, the algorithm
allocates a parent from the section it lands on.
A more deterministic selection option is @selectionremainder, which
performs two steps:
In the first step, the function selects parents deterministically according to the integer part of the scaled value for each individual. For example, if an individual's scaled value is 2.3, the function selects that individual twice as a parent.
In the second step, the selection function selects additional parents using the fractional parts of the scaled values, as in stochastic uniform selection. The function lays out a line in sections, whose lengths are proportional to the fractional part of the scaled value of the individuals, and moves along the line in equal steps to select the parents.
Note that if the fractional parts of the scaled values all equal 0, as can occur using
Topscaling, the selection is entirely deterministic.
For details and more selection options, see Selection Options.
Reproduction Options
Reproduction options control how the genetic algorithm creates the next generation. The options are
EliteCount— The number of individuals with the best fitness values in the current generation that are guaranteed to survive to the next generation. These individuals are called elite children.When
EliteCountis at least 1, the best fitness value can only decrease from one generation to the next. This is what you want to happen, since the genetic algorithm minimizes the fitness function. SettingEliteCountto a high value causes the fittest individuals to dominate the population, which can make the search less effective.CrossoverFraction— The fraction of individuals in the next generation, other than elite children, that are created by crossover. The topic "Setting the Crossover Fraction" in Vary Mutation and Crossover describes how the value ofCrossoverFractionaffects the performance of the genetic algorithm.
Because elite individuals have already been evaluated, ga
does not reevaluate the fitness function of elite individuals during reproduction.
This behavior assumes that the fitness function of an individual is not random, but
is a deterministic function. To change this behavior, use an output function. See
EvalElites in The State Structure.
Mutation and Crossover
The genetic algorithm uses the individuals in the current generation to create the children that make up the next generation. Besides elite children, which correspond to the individuals in the current generation with the best fitness values, the algorithm creates
Crossover children by selecting vector entries, or genes, from a pair of individuals in the current generation and combines them to form a child
Mutation children by applying random changes to a single individual in the current generation to create a child
Both processes are essential to the genetic algorithm. Crossover enables the algorithm to extract the best genes from different individuals and recombine them into potentially superior children. Mutation adds to the diversity of a population and thereby increases the likelihood that the algorithm will generate individuals with better fitness values.
See Creating the Next Generation for an example of how the genetic algorithm applies mutation and crossover.
You can specify how many of each type of children the algorithm creates as follows:
EliteCountspecifies the number of elite children.CrossoverFractionspecifies the fraction of the population, other than elite children, that are crossover children.
For example, if the PopulationSize is 20,
the EliteCount is 2, and the
CrossoverFraction is 0.8, the numbers of
each type of children in the next generation are as follows:
There are two elite children.
There are 18 individuals other than elite children, so the algorithm rounds 0.8*18 = 14.4 to 14 to get the number of crossover children.
The remaining four individuals, other than elite children, are mutation children.
Integer and Linear Constraints
When a problem has integer or linear constraints (including bounds), the algorithm modifies the evolution of the population.
When the problem has both integer and linear constraints, the software modifies all generated individuals to be feasible with respect to those constraints. You can use any creation, mutation, or crossover function, and the entire population remains feasible with respect to integer and linear constraints.
When the problem has only linear constraints, the software does not modify the individuals to be feasible with respect to those constraints. You must use creation, mutation, and crossover functions that maintain feasibility with respect to linear constraints. Otherwise, the population can become infeasible, and the result can be infeasible. The default operators maintain linear feasibility:
gacreationlinearfeasibleorgacreationnonlinearfeasiblefor creation,mutationadaptfeasiblefor mutation, andcrossoverintermediatefor crossover.
The internal algorithms for integer and linear feasibility are similar to those for
surrogateopt. When a problem has integer and linear constraints,
the algorithm first creates linearly feasible points. Then the algorithm tries to satisfy
integer constraints by rounding linearly feasible points to integers using a heuristic that
attempts to keep the points linearly feasible. When this process is unsuccessful in
obtaining enough feasible points for constructing a population, the algorithm calls
intlinprog to try to find more points that are feasible with
respect to bounds, linear constraints, and integer constraints.
Later, when mutation or crossover creates new population members, the algorithms ensure that the new members are integer and linear feasible by taking similar steps. Each new member is modified, if necessary, to be as close as possible to its original value, while also satisfying the integer and linear constraints and bounds.