irfplot
Plot impulse response function (IRF) of state-space model
Syntax
Description
irfplot plots the IRFs of the state and measurement variables in a state-space model. To return the IRFs as numeric arrays instead, use irf. Other state-space model tools to characterize the dynamics of a specified system include:
The forecast error variance decomposition (FEVD), computed by
fevd, provides information about the relative importance of each state disturbance in affecting the forecast error variance of all measurement variables in the system.Model-implied temporal correlations, computed by
corrfor a standard state-space model, measure the association between present and past state or measurement variables, as prescribed by the form of the model.
Fully Specified State-Space Model
irfplot( plots the IRF, or dynamic response, of each state and measurement variable of the fully specified state-space model Mdl)Mdl, such as an estimated model. irfplot plots a figure containing the IRFs of the measurement variables yt, and plots a separate figure containing the IRFs of the state variables xt. Each figure contains a subplot for each variable and state disturbance combination; subplot (i,j) is the IRF of variable j resulting from a unit shock applied to a state disturbance i
ui,t. Subplot titles identify the shocked variable and IRF variable.
irfplot( uses additional options specified by one or more name-value pair arguments. For example, Mdl,Name,Value)'PlotU',1:2,'PlotX',[] plots only the measurement variable IRFs resulting from shocks applied to the first and second state-disturbance variables (the state variable IRF plot is suppressed).
Partially Specified State-Space Model and Confidence Interval Estimation
irfplot(___, also plots pointwise lower and upper 95% Monte Carlo confidence bounds in each plot. 'Params',estParams,'EstParamCov',EstParamCov)EstParamCov specifies the estimated covariance matrix of the parameter estimates, as returned by the estimate function, and is required for confidence interval estimation.
Customize Figures
irfplot( plots on the axes objects specified by ax,___)ax instead of new figures. The option ax can precede any of the input argument combinations in the previous syntaxes.
Examples
Explicitly create the state-space model
A = 0.5; B = 0.2; C = 2; D = 0.01; Mdl = ssm(A,B,C,D)
Mdl =
State-space model type: ssm
State vector length: 1
Observation vector length: 1
State disturbance vector length: 1
Observation innovation vector length: 1
Sample size supported by model: Unlimited
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
State equation:
x1(t) = (0.50)x1(t-1) + (0.20)u1(t)
Observation equation:
y1(t) = (2)x1(t) + (0.01)e1(t)
Initial state distribution:
Initial state means
x1
0
Initial state covariance matrix
x1
x1 0.05
State types
x1
Stationary
Mdl is an ssm model object. Because all parameters have known values, the object is fully specified.
Plot the IRFs of the measurement and state variables.
irfplot(Mdl);
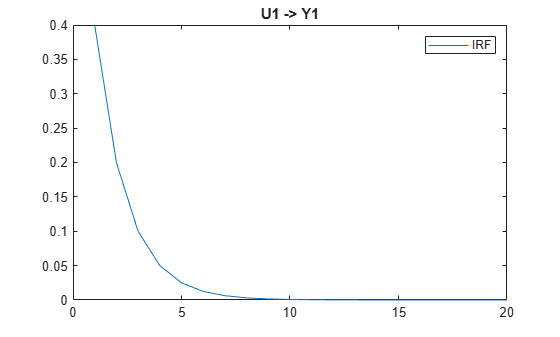
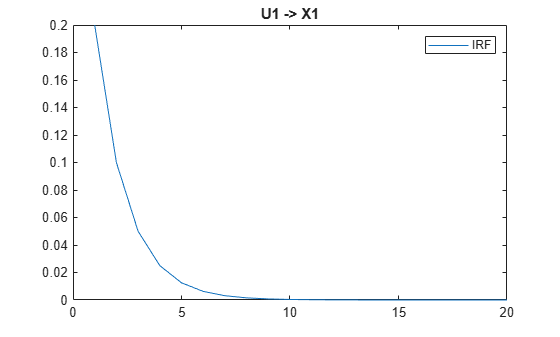
The plot entitled U1 -> Y1 is the IRF of , and the plot entitled U1 -> X1 is the IRF of . Both IRFs indicate that the effects of the shock on the system diminish after about 8 periods.
Plot the measurement variable IRF and the 95% confidence intervals on the true IRFs.
Assume that the data generating process (DGP) is the AR(1) model
where is a series of independent and identically distributed Gaussian variables with mean 0 and variance 1.
Simulate 500 observations from the model.
rng(1); % For reproducibility DGP = arima('Constant',1,'AR',{0 0.75},'Variance',1); y = simulate(DGP,500);
Explicitly create a diffuse state-space model template for estimation that represents the model. Fit the model to the data, and return parameter estimates and their corresponding estimated covariance matrix.
A = [0 NaN NaN; 0 1 0; 1 0 0];
B = [NaN; 0; 0];
C = [1 0 0];
D = 0;
Mdl = dssm(A,B,C,D,'StateType',[0 1 0]);
[~,estParams,EstParamCov] = estimate(Mdl,y,abs(randn(3,1)));Method: Maximum likelihood (fminunc)
Effective Sample size: 500
Logarithmic likelihood: -892.214
Akaike info criterion: 1790.43
Bayesian info criterion: 1803.07
| Coeff Std Err t Stat Prob
--------------------------------------------------
c(1) | 0.41320 0.12199 3.38730 0.00071
c(2) | 0.67319 0.02749 24.48749 0
c(3) | 1.11450 0.03623 30.76557 0
|
| Final State Std Dev t Stat Prob
x(1) | 3.69929 0 Inf 0
x(2) | 1 0 Inf 0
x(3) | 1.43378 0 Inf 0
Mdl is a fully specified, estimated dssm model object.
Plot the IRF, with its 95% confidence intervals, of the measurement variable.
irfplot(Mdl,'Params',estParams,'EstParamCov',EstParamCov,... 'PlotX',[]);
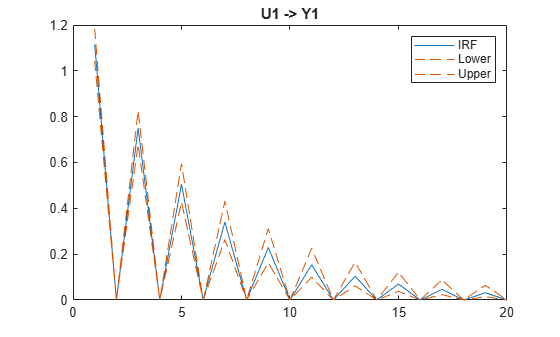
The blue line represents the estimated IRF of . The dashed red lines represent the upper and lower, pointwise 95% confidence bounds on the true IRF. The model has only one lag term (lag 2), as the shock filters through the system, it impacts the first state variable during odd periods only.
Simulate data from a known model, fit the data to a state-space model, and then the plot cumulative IRFs, with corresponding confidence bounds, of the estimated model to specified axes.
Assume that the data generating process (DGP) is the AR(1) model
where is a series of independent and identically distributed Gaussian variables with mean 0 and variance 1.
Simulate 500 observations from the model.
rng(1); % For reproducibility DGP = arima('Constant',1,'AR',{0 0.75},'Variance',1); y = simulate(DGP,500);
Explicitly create a state-space model template for estimation that represents the model
A = [0 NaN NaN; 0 1 0; 1 0 0];
B = [NaN; 0; 0];
C = [1 0 0];
D = 0;
Mdl = ssm(A,B,C,D,'StateType',[0 1 0]);Fit the model template to the data. Specify a set of positive, random standard Gaussian starting values for the three model parameters. Return the estimated model, the vector of estimated parameters, and the estimated parameter covariance matrix.
[EstMdl,estParams,EstParamCov] = estimate(Mdl,y,abs(randn(3,1)));
Method: Maximum likelihood (fminunc)
Sample size: 500
Logarithmic likelihood: -892.214
Akaike info criterion: 1790.43
Bayesian info criterion: 1803.07
| Coeff Std Err t Stat Prob
--------------------------------------------------
c(1) | 0.41320 0.12199 3.38730 0.00071
c(2) | 0.67319 0.02749 24.48749 0
c(3) | 1.11450 0.03623 30.76557 0
|
| Final State Std Dev t Stat Prob
x(1) | 3.69929 0 Inf 0
x(2) | 1 0 Inf 0
x(3) | 1.43378 0 Inf 0
EstMdl is a fully specified dssm model object.
Plot the cumulative IRFs, with corresponding confidence bounds, of the first and third state variables, and the measurement variable, of the estimated model by supplying the model template Mdl, the vector of estimated parameters estParams, and the estimated parameter covariance matrix EstParamCov. Return the plot in the same figure, on three separate subplots.
ax = gobjects(3,1); for j = 1:numel(ax) ax(j) = subplot(3,1,j); end irfplot(ax,Mdl,'Params',estParams,'EstParamCov',EstParamCov, ... 'Cumulative',true,'PlotX',[1 3]);
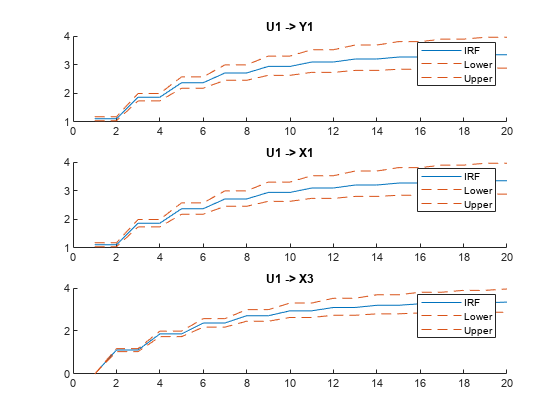
Because , the top two IRFs in the figure are equivalent. Because , the IRF in the subplot at the bottom of the figure is shifted to the left, relative to the other two plots.
Plot the 10-period IRFs of only the measurement variables in a system.
Explicitly create the multivariate diffuse state-space model
A = [1 0; 1 0.3]; B = [0.2 0; 0 1]; C = [1 0; 1 1]; D = eye(2); Mdl = dssm(A,B,C,D)
Mdl =
State-space model type: dssm
State vector length: 2
Observation vector length: 2
State disturbance vector length: 2
Observation innovation vector length: 2
Sample size supported by model: Unlimited
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
State equations:
x1(t) = x1(t-1) + (0.20)u1(t)
x2(t) = x1(t-1) + (0.30)x2(t-1) + u2(t)
Observation equations:
y1(t) = x1(t) + e1(t)
y2(t) = x1(t) + x2(t) + e2(t)
Initial state distribution:
Initial state means
x1 x2
0 0
Initial state covariance matrix
x1 x2
x1 Inf 0
x2 0 Inf
State types
x1 x2
Diffuse Diffuse
Mdl is a fully specified ssm model object.
Plot the two 10-period IRFs of , and suppress the state variable IRFs.
irfplot(Mdl,'NumPeriods',10,'PlotY',2,'PlotX',[]);
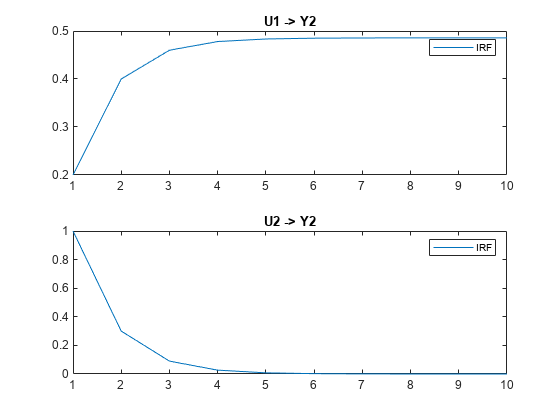
The top subplot is the IRF of resulting from a shock to , which is persistent because the shock filters through the random walk state .
The bottom subplot is the IRF of resulting from a shock to , which is transient and eventually diminishes as time elapses because the state exhibits autoregressive behavior.
Simulate data from a time-varying state-space model, fit a model to the data, then plot the time-varying IRF of the estimated model.
Consider the DGP represented by this system
Write a function that specifies how the parameters params map to the state-space model matrices. Save this code as a file named timeVariantAR1ParamMap.m on your MATLAB® path. Alternatively, open the example to access the function.
type timeVariantAR1ParamMap.m% Copyright 2020 The MathWorks, Inc.
function [A,B,C,D] = timeVariantAR1ParamMap(params)
% Time-varying state-space model parameter mapping function example. This
% function maps the vector params to the state-space matrices (A, B, C, and
% D). From periods 1 through 10, the state model is an AR(1)model, and from
% periods 11 through 20, the state model is possibly a different AR(1)
% model. The measurement equation is the same throughout the time span.
A1 = {params(1)};
A2 = {params(2)};
varu1 = exp(params(3)); % Positive variance constraints
varu2 = exp(params(4));
B1 = {sqrt(varu1)};
B2 = {sqrt(varu2)};
C = params(5);
vare1 = exp(params(6));
D = sqrt(vare1);
A = [repmat(A1,10,1); repmat(A2,10,1)];
B = [repmat(B1,10,1); repmat(B2,10,1)];
end
Implicitly create a partially specified state-space model representing the DGP. For this example, fix the measurement-sensitivity coefficient to 1.5.
C = 1.5; fixCParamMap = @(x)timeVariantAR1ParamMap([x(1:4), C, x(5)]); DGP = ssm(fixCParamMap);
Simulate 20 observations from the DGP. Because DGP is partially specified, pass the true parameter values to simulate by using the 'Params' name-value pair argument.
rng(10) % For reproducibility A1 = 0.75; A2 = -0.1; B1 = 1; B2 = 3; D = 2; trueParams = [A1 A2 2*log(B1) 2*log(B2) 2*log(D)]; % Transform variances for parameter map y = simulate(DGP,20,'Params',trueParams);
y is a 20-by-1 vector of simulated measurements from the DGP.
Because DGP is a partially specified, implicit model object, its parameters are unknown. Therefore, it can serve as a model template for estimation.
Fit the model to the simulated data. Specify random standard Gaussian draws for the initial parameter values. Return the parameter estimates.
[~,estParams] = estimate(DGP,y,randn(1,5),'Display','off')
estParams = 1×5
0.6164 -0.1665 0.0135 1.6803 -1.5854
estParams is a 1-by-5 vector of parameter estimates. The output argument list of the parameter mapping function determines the order of the estimates: A{1}, A{2}, B{1}, B{2}, and D.
Plot the IRF of the measurement and state variables by supplying DGP (not the estimated model) and the estimated parameters by using the 'Params' name-value pair argument.
h = irfplot(DGP,'Params',estParams); xline(h(1,1).Parent,10.5,'--')
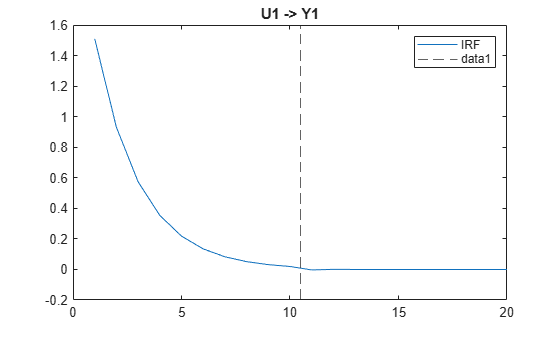
xline(h(1,2).Parent,10.5,'--')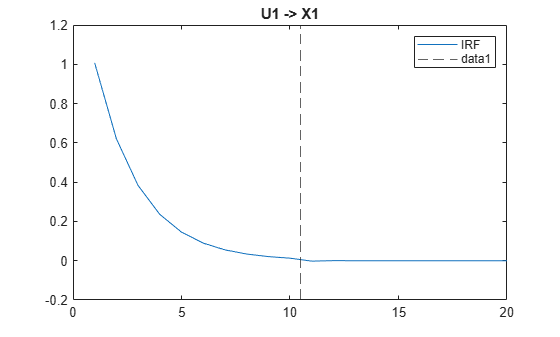
The figures show time-varying IRFs of the measurement and state variables. The first 10 periods correspond to the IRF of the first state equation. During period 11, what remains of the shock transfers to the second state equation, and filters through that system until it diminishes.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Algorithms
If you specify
'eigendecomposition'for the'Method'name-value pair argument,irfplotattempts to diagonalize the state-transition matrix A by using the spectral decomposition.irfplotresorts to recursive multiplication instead under at least one of these circumstances:An eigenvalue is complex.
The rank of the matrix of eigenvectors is less than the number of states
Mdlis time varying.
irfplotuses Monte Carlo simulation to compute confidence intervals.irfplotrandomly drawsNumPathsvariates from the asymptotic sampling distribution of the unknown parameters inMdl, which is Np(Params,EstParamCov), where p is the number of unknown parameters.For each randomly drawn parameter set j,
irfplot:Creates a state-space model that is equal to
Mdl, but substitutes in parameter set jComputes the random IRF of the resulting model ψj(t), where t = 1 through
NumPaths
For each time t, the lower bound of the confidence interval is the
(1 –quantile of the simulated IRF at period t ψ(t), wherec)/2cConfidence. Similarly, the upper bound of the confidence interval at time t is the(1 –upper quantile of ψ(t).c)/2
Version History
Introduced in R2020b