yolov4ObjectDetectorMonoCamera
Detect objects in monocular camera using YOLO v4 deep learning detector
Since R2022a
Description
The yolov4ObjectDetectorMonoCamera object contains information about you only look
once version 4 (YOLO v4) object detector that is configured for use with a monocular camera
sensor. To detect objects in an image captured by the camera, pass the detector to the
detect object
function.
When using the detect object function with a
yolov4ObjectDetectorMonoCamera object, use of a CUDA®-enabled NVIDIA® GPU is highly recommended. The GPU reduces computation time significantly. Usage
of the GPU requires Parallel Computing Toolbox™. For information about the supported compute capabilities, see GPU Computing Requirements (Parallel Computing Toolbox).
Creation
Create a
yolov4ObjectDetectorobject by calling thetrainYOLOv4ObjectDetectorfunction with training data (requires Deep Learning Toolbox™).detector = trainYOLOv4ObjectDetector(trainingData,____);
Create a
monoCameraobject to model the monocular camera sensor.sensor = monoCamera(____);
Create a
yolov4ObjectDetectorMonoCameraobject by passing the detector and sensor as inputs to theconfigureDetectorMonoCamerafunction. The configured detector inherits property values from the original detector.configuredDetector = configureDetectorMonoCamera(detector,sensor,____);
Properties
Object Functions
detect | Detect objects using YOLO v4 object detector configured for monocular camera |
Examples
Configure a YOLO v4 object detector for use with a monocular camera mounted on an ego vehicle. Use this detector to detect vehicles within a video captured by the camera.
Load a yolov4ObjectDetector object pretrained to detect vehicles.
detector = yolov4ObjectDetector("csp-darknet53-coco");Model a monocular camera sensor by creating a monoCamera object. This object contains the camera intrinsics and the location of the camera on the ego vehicle.
focalLength = [309.4362 344.2161]; % [fx fy] principalPoint = [318.9034 257.5352]; % [cx cy] imageSize = [480 640]; % [mrows ncols] height = 2.1798; % height of camera above ground, in meters pitch = 14; % pitch of camera, in degrees intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize); sensor = monoCamera(intrinsics,height,Pitch=pitch);
Configure the detector for use with the camera. Limit the width of detected objects to 1.5-2.5 meters. The configured detector is a yolov4ObjectDetectorMonoCamera object.
vehicleWidth = [1.5 2.5]; detectorMonoCam = configureDetectorMonoCamera(detector,sensor,vehicleWidth);
Set up the video reader and read the input monocular video.
videoFile = '05_highway_lanechange_25s.mp4';
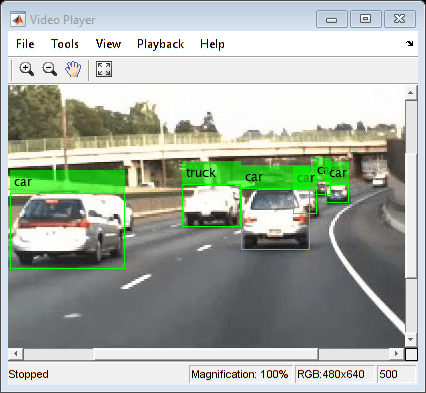
reader = VideoReader(videoFile);Create a video player to display the detection results. Detect the vehicles in each frame by using the configured detector. Annotate the video frames with the bounding boxes for the detections and the detection confidence scores.
videoPlayer = vision.VideoPlayer(); while hasFrame(reader) frame = readFrame(reader); % Run the detector [bboxes,scores,labels] = detect(detectorMonoCam,frame,Threshold=0.6); if ~isempty(bboxes) frame = insertObjectAnnotation(frame,"Rectangle",bboxes,labels,AnnotationColor="green"); end step(videoPlayer,frame); end
Close the video player.
release(videoPlayer);
Version History
Introduced in R2022a