rotateframe
Quaternion frame rotation
Description
rotationResult = rotateframe(quat,cartesianPoints)quat. The elements of the quaternion are normalized before
use in the rotation.
Examples
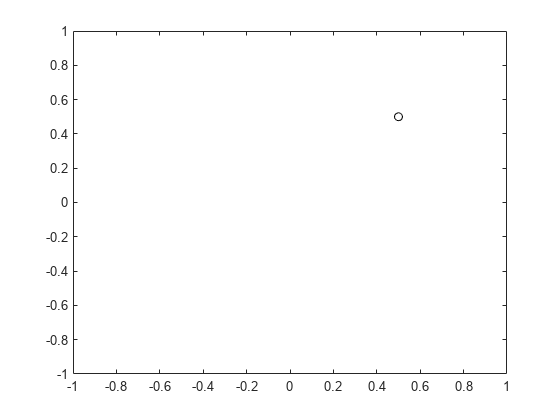
Define a point in three dimensions. The coordinates of a point are always specified in the order x, y, and z. For convenient visualization, define the point on the x-y plane.
x = 0.5; y = 0.5; z = 0; plot(x,y,"ko") hold on axis([-1 1 -1 1])
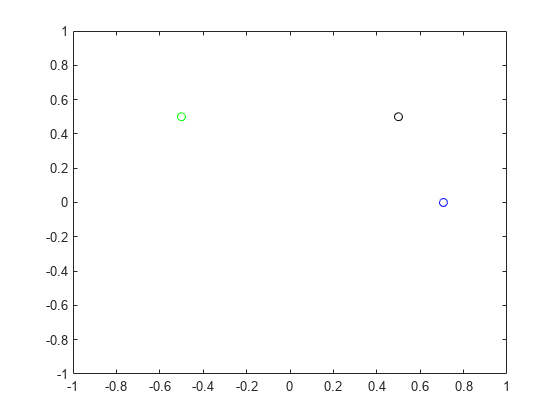
Create a quaternion vector specifying two separate rotations, one to rotate the frame 45 degrees and another to rotate the point -90 degrees about the z-axis. Use rotateframe to perform the rotations.
quat = quaternion([0,0,pi/4; ... 0,0,-pi/2],"euler","XYZ","frame"); rereferencedPoint = rotateframe(quat,[x,y,z])
rereferencedPoint = 2×3
0.7071 -0.0000 0
-0.5000 0.5000 0
Plot the re-referenced points.
plot(rereferencedPoint(1,1),rereferencedPoint(1,2),"bo") plot(rereferencedPoint(2,1),rereferencedPoint(2,2),"go")
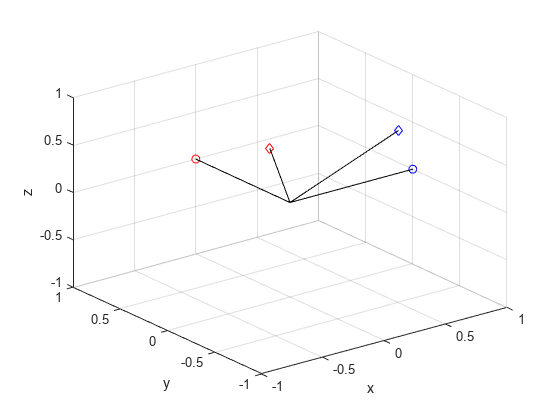
Define two points in three-dimensional space. Define a quaternion to re-reference the points by first rotating the reference frame about the z-axis 30 degrees and then about the new y-axis 45 degrees.
a = [1,0,0]; b = [0,1,0]; quat = quaternion([30,45,0],"eulerd","ZYX","point");
Use rotateframe to reference both points using the quaternion rotation operator. Display the result.
rP = rotateframe(quat,[a;b])
rP = 2×3
0.6124 -0.3536 0.7071
0.5000 0.8660 -0.0000
Visualize the original orientation and the rotated orientation of the points. Draw lines from the origin to each of the points for visualization purposes.
plot3(a(1),a(2),a(3),"bo"); hold on grid on axis([-1 1 -1 1 -1 1]) xlabel("x") ylabel("y") zlabel("z") plot3(b(1),b(2),b(3),"ro"); plot3(rP(1,1),rP(1,2),rP(1,3),"bd") plot3(rP(2,1),rP(2,2),rP(2,3),"rd") plot3([0;rP(1,1)],[0;rP(1,2)],[0;rP(1,3)],"k") plot3([0;rP(2,1)],[0;rP(2,2)],[0;rP(2,3)],"k") plot3([0;a(1)],[0;a(2)],[0;a(3)],"k") plot3([0;b(1)],[0;b(2)],[0;b(3)],"k")
Input Arguments
Output Arguments
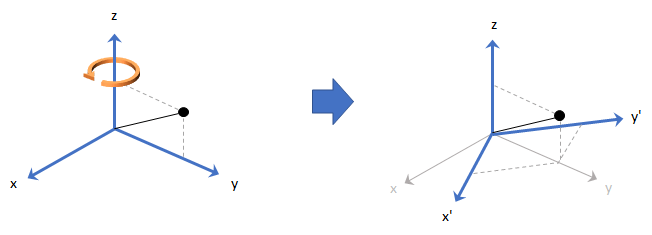
Algorithms
Quaternion frame rotation re-references a point specified in R3 by rotating the original frame of reference according to a specified quaternion:
where q is the quaternion, * represents conjugation, and u is the point to rotate, specified as a quaternion.
For convenience, the rotateframe function takes a point in R3 and returns a point in R3. Given a function call with
some arbitrary quaternion, q = a + bi +
cj + dk, and arbitrary coordinate, [x,y,z],
point = [x,y,z]; rereferencedPoint = rotateframe(q,point)
rotateframe function performs the following operations:
Converts point [x,y,z] to a quaternion:
Normalizes the quaternion, q:
Applies the rotation:
Converts the quaternion output, vq, back to R3
Extended Capabilities
Version History
Introduced in R2020a