birdsEyeView
Create bird's-eye view using inverse perspective mapping
Description
Use the birdsEyeView object to create a bird's-eye view of a
2-D scene using inverse perspective mapping. To transform an image into a bird's-eye
view, pass a birdsEyeView object and that image to the transformImage function. To convert the bird’s-eye-view image
coordinates to or from vehicle coordinates, use the imageToVehicle and vehicleToImage functions. All of these functions assume that the input
image does not have lens distortion. To remove lens distortion, use the undistortImage function.
Creation
Description
birdsEye = birdsEyeView(sensor,outView,outImageSize)
creates a birdsEyeView object for transforming an image to a bird’s-eye-view.
sensoris amonoCameraobject that defines the configuration of the camera sensor. This input sets theSensorproperty.outViewdefines the portion of the camera view, in vehicle coordinates, that is transformed into a bird's-eye view. This input sets theOutputViewproperty.outImageSizedefines the size, in pixels, of the output bird's-eye-view image. This input sets theImageSizeproperty.
Properties
Camera sensor configuration, specified as a monoCamera object. The
object contains the intrinsic camera parameters, the mounting height, and
the camera mounting angles. This configuration defines the vehicle
coordinate system of the birdsEyeView object. For more
details, see Vehicle Coordinate System.
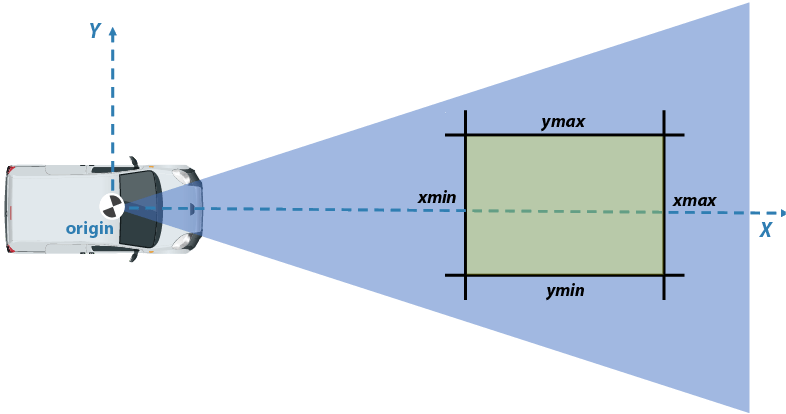
Coordinates of the region to transform into a bird's-eye-view image,
specified as a four-element vector of the form [xmin
xmax
ymin
ymax]. The units are in world coordinates, such as meters
or feet, as determined by the Sensor property. The four coordinates define the output
space in the (X, Y) coordinate system,
with the origin centered on the location of the camera sensor.
You can set this property when you create the object. After you create the object, this property is read-only.
Size of output bird's-eye-view images, in pixels, specified as a
two-element vector of the form [m
n], where m and n
specify the number of rows and columns of pixels for the output image,
respectively. If you specify a value for one dimension, you can set the
other dimension to NaN and birdsEyeView
calculates this value automatically. Setting one dimension to
NaN maintains the same pixel to world-unit ratio
along the XV-axis and
YV-axis.
You can set this property when you create the object. After you create the object, this property is read-only.
Object Functions
transformImage | Transform image to bird's-eye view |
imageToVehicle | Convert bird's-eye-view image coordinates to vehicle coordinates |
vehicleToImage | Convert vehicle coordinates to bird's-eye-view image coordinates |
Examples
Create a bird's-eye-view image from an image obtained by a front-facing camera mounted on a vehicle. Display points within the bird's-eye view using the vehicle and image coordinate systems.
Define the camera intrinsics and create an object containing these intrinsics.
focalLength = [309.4362 344.2161]; principalPoint = [318.9034 257.5352]; imageSize = [480 640]; camIntrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
Set the height of the camera to be about 2 meters above the ground. Set the pitch of the camera to 14 degrees toward the ground.
height = 2.1798; pitch = 14;
Create an object containing the camera configuration.
sensor = monoCamera(camIntrinsics,height,'Pitch',pitch);Define the area in front of the camera that you want to transform into a bird's-eye view. Set an area from 3 to 30 meters in front of the camera, with 6 meters to either side of the camera.
distAhead = 30; spaceToOneSide = 6; bottomOffset = 3; outView = [bottomOffset,distAhead,-spaceToOneSide,spaceToOneSide];
Set the output image width to 250 pixels. Compute the output length automatically from the width by setting the length to NaN.
outImageSize = [NaN,250];
Create an object for performing bird's-eye-view transforms, using the previously defined parameters.
birdsEye = birdsEyeView(sensor,outView,outImageSize);
Load an image that was captured by the sensor.
I = imread('road.png'); figure imshow(I) title('Original Image')

Transform the input image into a bird's-eye-view image.
BEV = transformImage(birdsEye,I);
In the bird's-eye-view image, place a 20-meter marker directly in front of the sensor. Use the vehicleToImage function to specify the location of the marker in vehicle coordinates. Display the marker on the bird's-eye-view image.
imagePoint = vehicleToImage(birdsEye,[20 0]); annotatedBEV = insertMarker(BEV,imagePoint); annotatedBEV = insertText(annotatedBEV,imagePoint + 5,'20 meters'); figure imshow(annotatedBEV) title('Bird''s-Eye-View Image: vehicleToImage')

Define a location in the original bird's-eye-view image, this time in image coordinates. Use the imageToVehicle function to convert the image coordinates to vehicle coordinates. Display the distance between the marker and the front of the vehicle.
imagePoint2 = [120 400]; annotatedBEV = insertMarker(BEV,imagePoint2); vehiclePoint = imageToVehicle(birdsEye,imagePoint2); xAhead = vehiclePoint(1); displayText = sprintf('%.2f meters',xAhead); annotatedBEV = insertText(annotatedBEV,imagePoint2 + 5,displayText); figure imshow(annotatedBEV) title('Bird''s-Eye-View Image: imageToVehicle')

More About
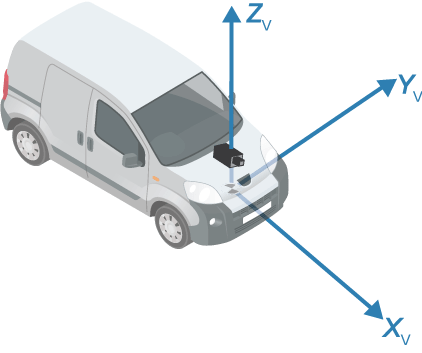
In the vehicle coordinate system
(XV,
YV,
ZV) defined by the input monoCamera object:
The XV-axis points forward from the vehicle.
The YV-axis points to the left, as viewed when facing forward.
The ZV-axis points up from the ground to maintain the right-handed coordinate system.
The default origin of this coordinate system is on the road surface, directly below the camera center. The focal point of the camera defines this center point.
To change the placement of the origin within the vehicle coordinate system, update
the SensorLocation property of the input monoCamera object.
For more details about the vehicle coordinate system, see Coordinate Systems in Automated Driving Toolbox.
Extended Capabilities
Version History
Introduced in R2017a