Rotor
Libraries:
Aerospace Blockset /
Propulsion
Description
The Rotor block computes the aerodynamic forces and moments generated by a rotating propeller or rotor in all three dimensions. The block lets you include the effect of the tilt in rotor disc due to flap motion, while in forward flight, on the generated force and moments. The Rotor block considers the effect of axial as well as transverse flow through the rotor disc, as is required for analysis of rotorcraft systems.
Examples

Helicopter Modeling and Simulation
Demonstrates how to model, simulate, control, and visualize a UH-1H helicopter system in Simulink® using the Rotor and 6DOF (Euler Angles) blocks from Aerospace Blockset™.
- Since R2024b

Mars Helicopter Simulink-Based System Level Design
Model a helicopter with coaxial rotors suitable to fly on Mars.
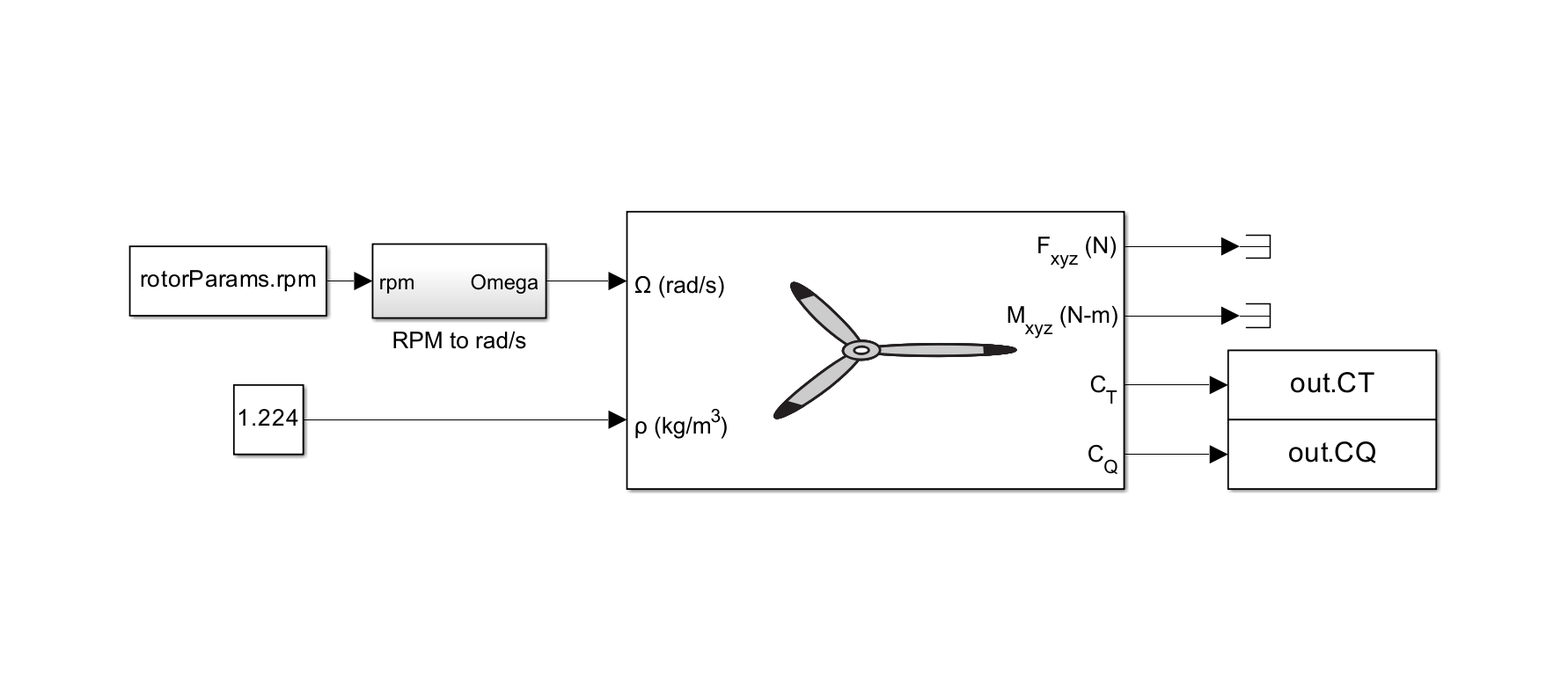
Compute Thrust and Torque Coefficients Using Rotor Block
Compute thrust and torque coefficient of an isolated rotor.
Limitations
The block follows a simplified approach with the option to include steady state flap effects. It does not model dynamic flap, lag, or feathering motion of blade.
The block outputs have been verified against the algorithms used, for input and parameter values within reasonable limits (as observed from literature).
The block uses Twist distribution to model only linear or ideal twist distributions. The block assumes that the blade chord and lift curve slope are constant.
The effect of collective pitch input and drag coefficient is incorporated in the block through the thrust and torque coefficients alone. Hence, the collective input port and the drag coefficient is active only when CT and CQ Source dropdown is set to
Compute using BEMT.
Ports
Input
Rotor speed, specified as a scalar in rad/sec in body frame.
Data Types: double
Air density, specified as a positive scalar in specified units.
Data Types: double
Velocity of rotor, specified as a 3-by-1 or 1-by-3 vector in body frame. To perform a multisystem analysis, consider connecting output from a State-Space or Integrator block to this port.
Dependencies
To enable this input, set Modeling to With flap
effects.
The unit of velocity depends on the value of the Units
parameter.
Data Types: double
Angular velocity of entire vehicle, specified as a 3-by-1 or 1-by-3 vector in rad/s in body frame.
Dependencies
To enable this input, set Modeling to With flap
effects.
Data Types: double
Collective blade pitch angle, specified as a scalar in radians.
Dependencies
To enable this input port, select the Include pitch angle inputs check
box and set the CT and CQ Source dropdown to
Compute using BEMT.
Data Types: double
Lateral cyclic pitch angle, specified as a scalar in radians.
Dependencies
To enable this input port,
Select the Include pitch angle inputs check box.
Set Modeling to
With flap effects.
Data Types: double
Longitudinal cyclic pitch angle, specified as a scalar in radians.
Dependencies
To enable this input port,
Select the Include pitch angle inputs check box.
Set Modeling to
With flap effects.
Data Types: double
Input thrust coefficient, specified as a nonzero positive scalar.
Dependencies
To enable this input port, set the CT and CQ Source dropdown to 'Ports'.
Data Types: double
Input torque coefficient, specified as a nonzero positive scalar.
Dependencies
To enable this output port, set the CT and CQ Source dropdown to 'Ports'.
Data Types: double
Output
Total force, returned as a three-element vector in body frame. Units depend on the Units parameter.
Data Types: double
Net moment in the x-y-z direction, returned as a three-element vector in body frame. Units depend on the Units parameter.
Data Types: double
Computed thrust coefficient, returned as a positive scalar.
Dependencies
To enable this output port, select the Output computed CT
and CQ check box and set the CT and CQ
Source dropdown to Compute using
BEMT.
Data Types: double
Computed torque coefficient, returned as a positive scalar.
Dependencies
To enable this output port, select the Output computed CT
and CQ check box and set the CT and CQ
Source dropdown to Compute using
BEMT.
Data Types: double
Parameters
Main
| Units | Velocity | Density | Force | Moment | Radius | Chord | Hinge offset |
|---|---|---|---|---|---|---|---|
Metric (MKS)
| Meters per second | kg/m3 | Newtons | Newton-meter | Meters | Meters | Meters |
English (Velocity in ft/s)
| Feet per second | slug/ft3 | Pound force | Pound force-feet | Feet | Feet | Feet |
English (Velocity in kts)
| Knots | slug/ft3 | Pound force | Pound force-feet | Feet | Feet | Feet |
Programmatic Use
Block Parameter:
units |
| Type: character vector |
Values: 'Metric (MKS)' |
'English (Velocity in ft/s)' | 'English (Velocity in
kts)' |
Default: 'Metric
(MKS)' |
Rotor thrust calculation method, specified as:
Without flap effects— Model rotor thrust using force and moment calculations. For more information, see Force and Moment.With flap effects— Effect of tilt in rotor disc due to flap motion, while in forward flight, is included. The steady state lateral and longitudinal flap angles are calculated using the equations from [1] and used in the computation of forces and moments [2]. For more information, see Force and Moment.
Programmatic Use
Block Parameter: modelMode |
| Type: character vector |
Values: 'Without flap effects' | 'With flap effects' |
Default: 'Without flap effects' |
Select this check box to enable the pitch angle (swash plate) input ports.
Dependencies
To enable this checkbox
Set the CT and CQ Source dropdown to
Compute using BEMT
and/or
Set Modeling to
'With flap effects'
Programmatic Use
Block Parameter:
controlInput |
| Type: character vector |
Values: 'on' |
'off' |
Default: 'off' |
Rotor
Select the source of the thrust coefficient and torque coefficient values, specified as a
character vector of value 'Dialog', 'Compute using BEMT'
or 'Ports'. The block assumes the aerodynamic and structural parameters to
be constant.
Select
'Dialog'to manually enter the thrust and torque coefficient values.Select
'Compute using BEMT'to compute the values using Blade Element Momentum Theory (BEMT). For more information on BEMT, see Thrust Coefficient and Torque Coefficient Calculations.Select
'Ports'to accept the thrust and torque coefficient values as inputs.
Programmatic Use
Block Parameter:
CTCQMode |
| Type: character vector |
Values: 'Dialog' |
'Compute using BEMT' |
Default: 'Dialog' |
Thrust coefficient, specified as a nonzero positive scalar.
Dependencies
To enable this parameter, set the CT and CQ Source dropdown
to 'Dialog'.
Programmatic Use
Block Parameter:
CT |
| Type: character vector |
Values: '0.0107' |
nonzero positive scalar |
Default:
'0.0107' |
Torque coefficient, specified as a nonzero positive scalar.
Dependencies
To enable this parameter, set the CT and CQ Source dropdown
to 'Dialog'.
Programmatic Use
Block Parameter:
CQ |
| Type: character vector |
Values: '7.8263e-4' |
nonzero positive scalar |
Default:
'7.8263e-4' |
Number of blades, specified as a nonzero positive scalar.
Dependencies
To enable this parameter,
Set the CT and CQ Source dropdown to
Compute using BEMT
and/or
Set Modeling to
'With flap effects'
Programmatic Use
Block Parameter:
Nb |
| Type: character vector |
Values: '2' | nonzero
positive scalar |
Default: '2' |
Select this check box to output the calculated thrust coefficient and torque coefficient to CT and CQ output ports. For more information on these calculations, see Thrust Coefficient and Torque Coefficient Calculations. The block assumes the aerodynamic and structural parameters to be constant.
Otherwise, clear this check box.
Dependencies
To enable this parameter, set the CT and CQ Source dropdown
to 'Compute using BEMT'.
Programmatic Use
Block Parameter: CTout |
| Type: character vector |
Values: 'on' | 'off' |
Default: 'off' |
Blade
Rotor radius, specified as a nonzero positive scalar.
Programmatic Use
Block Parameter: radius |
| Type: character vector |
Values: '0.0330' | nonzero positive
scalar |
Default: '0.0330' |
Blade chord, specified as a nonzero positive scalar.
Dependencies
To enable this checkbox,
Set the CT and CQ Source dropdown to
'Compute using BEMT'.
and/or
Set Modeling to
'With flap effects'
Programmatic Use
Block Parameter: chord |
| Type: character vector |
Values: '0.0080' | nonzero positive
scalar |
Default: '0.0080' |
Hinge offset, specified as a positive scalar. This value is typically
0 for propellers.
Dependencies
To enable this checkbox,
Set the CT and CQ Source dropdown to
'Compute using BEMT'.
and/or
Set Modeling to
'With flap effects'
Programmatic Use
Block Parameter:
hingeOffset |
| Type: character vector |
Values: '0' | positive
scalar |
Default: '0' |
Lift curve slope, specified as a nonzero positive scalar. The block assumes the aerodynamic and structural parameters to be constant. The block does not consider variation with respect to angle of attack.
Dependencies
To enable this checkbox,
Set the CT and CQ Source dropdown to
'Compute using BEMT'.
and/or
Set Modeling to
'With flap effects'
Programmatic Use
Block Parameter: clalpha |
| Type: character vector |
Values: '5.5' | nonzero positive
scalar |
Default: '5.5' |
Mean drag coefficient, specified as a positive scalar. The block does not consider variation with respect to angle of attack.
Dependencies
To enable this parameter, set the CT and CQ Source dropdown
to 'Compute using BEMT'.
Programmatic Use
Block Parameter:
cd0 |
| Type: character vector |
Values: '0' | positive
scalar |
Default: '0' |
Lock number, which is the ratio of aerodynamics forces to inertial forces, specified as a nonzero positive scalar.
Dependencies
To enable this parameter, set Modeling to With flap effects.
Programmatic Use
Block Parameter: gamma |
| Type: character vector |
Values: '0.6051' | nonzero positive
scalar |
Default: '0.6051' |
Rotor blade twist distribution, specified as:
Linear— Close approximation of blade twist distribution.Ideal— Optimal approximation of blade twist distribution.
where r is the nondimensional radial location along the blade.
Dependencies
To enable this checkbox,
Set the CT and CQ Source dropdown to
'Compute using BEMT'.
and/or
Set Modeling to
'With flap effects'
Programmatic Use
Block Parameter:
twistType |
| Type: character vector |
Values: 'Linear' |
'Ideal' |
Default:
'Linear' |
Blade root pitch angle θroot, specified as a real scalar.
Dependencies
To enable this parameter:
Set the CT and CQ Source dropdown to
'Compute using BEMT'.
and/or
Set Modeling to
'With flap effects'
Set Twist distribution to
Linear.
Programmatic Use
Block Parameter: thetaRoot |
| Type: real scalar |
Values: '0.2548' | nonzero positive
scalar |
Default: '0.2548' |
Blade twist angle θtwist, specified as a real scalar.
Dependencies
To enable this parameter:
Set the CT and CQ Source dropdown to
'Compute using BEMT'.
and/or
Set Modeling to
'With flap effects'
Set Twist distribution to
Linear.
Programmatic Use
Block Parameter: thetaTwist |
| Type: real scalar |
Values: '0.1018' | positive
scalar |
Default: '0.1018' |
Blade tip pitch angle θtip for ideal twist distribution, specified as a real scalar.
Dependencies
To enable this parameter:
Set the CT and CQ Source dropdown to
'Compute using BEMT'.
and/or
Set Modeling to
'With flap effects'
Set Twist distribution to
Ideal.
Programmatic Use
Block Parameter: thetaTip |
| Type: real scalar |
Values: '0.06' | nonzero positive
scalar |
Default: '0.06' |
Algorithms
Force and moment calculated using these equations:
Without flap effects
With flap effects
where:
Ω is the rotor speed in rad/s.
βc and βs are the steady state flap angles computed using the equations in Chapter 7 of [1].
When the Compute CT and CQ check box is selected, the Rotor block calculates the thrust coefficient and torque coefficient using these equations.
With the inclusion of Prandtl’s tip loss function, the incremental thrust coefficient using blade element momentum theory is:
where F is the correction factor:
For the equations in this section:
r is the nondimensional radial location.
λ is the inflow through the rotor disc.
clα is the lift curve slope.
σ is the rotor solidity defined as , where c is the chord, R is the radius and Nb is the number of blades.
According to blade element theory, the incremental thrust coefficient is:
Here, θ(r) will depend on the blade twist distribution and the collective pitch input θ0. Equating the two expressions for dCT returns 4Fλ² = 0.5 σcıα (θ(r)r − λ), which can be iteratively solved for λ.
Sum dСT = 4Fλ²r dr across the blade span, to find the net thrust coefficient CT.
For the torque coefficient CQ, the profile drag component is approximately included as . The net torque coefficient can be calculated by summing dСQ = λdСT across the blade span and adding the profile drag component.
Propellers and rotors are both mechanical devices designed to move fluid in order to generate thrust. Despite their similar function, they are optimized for different applications based on their design characteristics.
Propellers are typically used in airplanes, drones, and boats. Propellers move an aircraft or vessel forward by rotating and pushing air or water behind them.
In propeller-based systems, control is primarily achieved through adjusting the propeller speed. For systems with differential pitch propellers, control also involves collective pitch input. Additionally, when dealing with propellers, the primary focus is on the axial flow.
Rotors are mainly found in helicopters and some types of drones. Rotors provide forward thrust and enable vertical lift and control over the pitch, roll, and yaw of the aircraft.
In rotor-based systems, control is managed through the swashplate system using collective pitch and cyclic pitch inputs. The cyclic pitch is crucial for controlling lateral and longitudinal flight. Additionally, axial and transverse flow are considered when computing the generated forces and moments.
You can use the Rotor block for both rotors and propellers, however, the conventions differ based on the application.
Thrust — The equation for the thrust in propellers is , where:
kT is the thrust coefficient.
ρ is the density.
n is the propeller speed in rev/s.
D is the propeller diameter.
In the Rotor block, the basic thrust equation is defined as , where:
CT is the thrust coefficient.
ρ is the density.
Ω is the rotor speed in rad/s.
R is the rotor radius.
The two constants are related by the equation .
Torque — In the Rotor block, torque is defined as .
In propellers, torque is defined by .
The two constants are related by the equation .
The advance ratio is the nondimensional forward velocity, defined as the ratio of the forward speed of the vehicle to the product of the rotational speed of the propeller or rotor and the diameter of the propeller or rotor.
The thrust and torque coefficient parameters may be available as functions of advance ratio. The definition of advance ratio differs based on the application of the rotating device, specifically whether the device is being used for propulsion or vertical flight.
References
[1] Prouty, Raymond W. Helicopter Performance, Stability, and Control Krieger Publishing Company, 1995.
[2] Riether, F. (2016). Agile quadrotor maneuvering using tensor-decomposition-based globally optimal control and onboard visual-inertial estimation (Doctoral dissertation, Massachusetts Institute of Technology).
Version History
Introduced in R2023aStarting R2025a, you can include
CT and
CQ as optional
input ports for the Rotor block, when you set the
CT and CQ Source dropdown to
'Ports'.
Starting R2024b, the Rotor block has been updated to support swashplate inputs. This addition allows for the inclusion of collective and cyclic blade pitch angles in the calculation of Forces and Moments through new optional input ports.
Rotor speed, Ω, also now accepts negative inputs.
Starting R2024b, the Rotor block has been updated to include the dropdown CT and CQ Source with two options:
'Dialog'and'Compute using BEMT'.Select
'Dialog'to manually enter the thrust and torque coefficient values.Select
'Compute using BEMT'to compute the values using Blade Element Momentum Theory (BEMT). For more information on BEMT, see Thrust Coefficient and Torque Coefficient Calculations. This option is equivalent to the Compute CT and CQ checkbox from previous releases.
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)