phased.TOAEstimator
Description
The phased.TOAEstimator creates a time-of-arrival System object™ to estimate times-of-arrival (TOA) or time-differences of arrival (TDOA) of
signals at known anchor points. The System object then uses time estimates to perform 2-D or 3-D target positioning of objects.
Anchors can encompass receivers or transmitter such as cellular base stations, Wi-Fi® access points, ground radar stations, or sonobuoys with known positions and a
target whose position is to be determined.
To estimate TOA or TDOA and estimate target positions:
Create the
phased.TOAEstimatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
estim = phased.TOAEstimatorestim.
estim = phased.TOAEstimator(Name=Value)estim
System object with each specified property Name set to the specified
Value. You can specify additional name-value pair arguments in any
order as
(Name1=Value1,...,NameN=ValueN).
Properties
Usage
Syntax
Description
Y = estim(X,freqspacing)Y at anchors from the channel estimation matrix
X. This syntax assumes that the anchors and the target are time-synchronized.
If the
Measurementproperty is set to'TOA', the object estimates the TOA between each anchor and the target.If the
Measurementproperty is set to'TDOA', the object performs TOA estimation first and then uses the TOA measurements to calculate TDOA.
The freqspacing represents the channel frequency
spacing.
Y = estim(X,freqspacing,delayoffset)Y are compensated by the
delayoffset ar. To enable this syntax, set the
DelayOffsetInputPort property to true.
[
outputs the measurement variances Y,var] = estim(X,freqspacing,delayoffset,...)var. To enable this syntax, set the
VarianceOutputPort property to true.
[
calculates the output measurement variances Y,var] = estim(X,freqspacing,…,npow)var for input Gaussian
white noise power npow.
[
outputs the FFT-based TOA response Y,...,toaresp,toagrid] = estim(X,freqspacing,...)toaresp and the TOA grid
toagrid. To enable this syntax, set the
TOAResponseOutputPort property to true.
[
outputs the estimated target position Y,...,tgtposest,tgtposcov] = estim(X,freqspacing,...,anchorpos)tgtposest and the estimated
target position covariance tgtposcov. This syntax also accepts anchor
positions anchorpos as input. To enable this syntax, set the
TargetPositionOutputPort property to
true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
FFT-Based TOA and TDOA Estimation
Use received signals from five anchors with known positions to perform FFT-based TOA estimation. Obtain TDOA measurements followed by two-step WLLS-based TDOA positioning. The data is loaded from the TOAEstimatorExampleData file whose variables are here:
toa Anchor TOAs
N Number of sub-bands
M Number of channel samples
freqspacing Frequency spacing
npow Noise power
anchorpos Anchor positions
tgtpos Actual target position
First, load data from file.
load TOAEstimatorExampleData;Create an exponential signal in a noise-free frequency-domain channel.
expsignal = exp(-1j*2*pi*(1:N)'*freqspacing*toa);
Create frequency-domain channel estimate.
X = cell(1,L); for l = 1:L X{l} = expsignal(:,l)*ones(1,M) + ... sqrt(npow/2)*(randn(N,M)+1j*randn(N,M)); end
Configure a TDOA estimator to perform FFT-based spectrum analysis.
tdoaEstimator = phased.TOAEstimator('Measurement','TDOA',... 'SpectrumMethod','FFT','NoisePower',npow,... 'VarianceOutputPort',true,'TargetPositionOutputPort',true);
Estimate TDOA from the estimated TOA.
[tdoaest,tdoavar,tgtposest] = tdoaEstimator(X,freqspacing,anchorpos);
Find the rms target position estimate.
rmsetgtpos = rmse(tgtposest,tgtpos); disp(['RMS TDOA positioning error = ',num2str(rmsetgtpos),' meters.'])
RMS TDOA positioning error = 0.10661 meters.
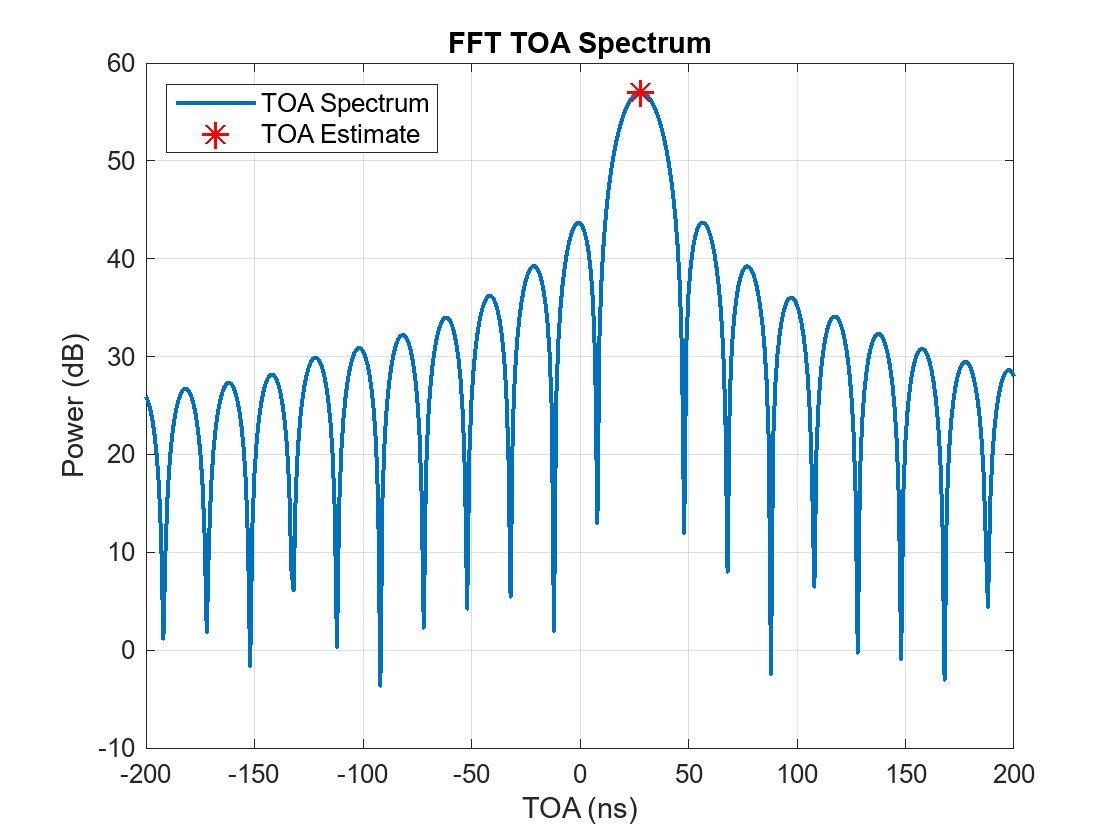
Plot the TOA spectrum.
[toaGrid,toaSpectrum,toaEst] = plotTOASpectrum( ... tdoaEstimator,freqspacing,'AnchorIndex',1, ... 'MaxDelay',200e-9);
MUSIC-Based Position Estimation
Perform MUSIC-based TOA estimation to obtain position estimates using received signals from five anchors with known positions. The data is loaded from the TOAEstimatorExampleData file whose variables are listed here:
toa Anchor TOAs
N Number of sub-bands
M Number of channel samples
freqspacing Frequency spacing
npow Noise power
anchorpos Anchor positions
tgtpos Actual target position
Load signal data.
load TOAEstimatorExampleData; Create the noise-free exponential signal models for all channels.
expsignal = exp(-1j*2*pi*(1:N)'*(freqspacing*toa));
Add Gaussian white noise.
X = cell(1,L); for l = 1:L X{l} = expsignal(:,l)*ones(1,M) + ... sqrt(npow/2)*(randn(N,M)+1j*randn(N,M)); end
Configure TOA estimator for MUSIC-based spectrum analysis.
toaEstimator = phased.TOAEstimator('Measurement','TOA', ... 'SpectrumMethod','MUSIC','VarianceOutputPort',true, ... 'NoisePower',npow,'ForwardBackwardAveraging',true, ... 'SpatialSmoothing',ceil(N/2));
Perform TOA estimation.
[toaest,toavar] = toaEstimator(X,freqspacing);
Perform TOA-based position estimation.
[tgtposest,tgtposcov] = toaposest(toaest,toavar,anchorpos);
Compute the RMSE target position estimate.
rmsepos = rmse(tgtposest,tgtpos); disp(['RMS TOA positioning error = ', num2str(rmsepos), ' meters.'])
RMS TOA positioning error = 0.10669 meters.
Algorithms
TOA Estimation
Time TOA estimation relies on spectrum estimation such as FFT or
MUSIC to process the channel estimation matrix to obtain TOA detections τ. If multiple delay
peaks τ = (τ1, τ2, …,
τn) are detected, the TOA estimation algorithm outputs the minimum
delay as the TOA estimate. FFT spectrum estimation is the simplest algorithm to estimate
TOA from channel estimates. MUSIC spectrum estimation method is a super-resolution spectrum
estimation algorithm. It requires estimate null space of the covariance matrix of the
channel estimate. Forward-backward averaging and spatial smoothing can used to improve the
rank of the covariance matrix used for MUSIC.
TOA estimation relies on spectrum estimation such as FFT or
MUSIC to process the channel estimation matrix to obtain TOA detections τ. If multiple delay
peaks τ = (τ1, τ2, …,
τn) are detected, the TOA estimation algorithm outputs the minimum
delay as the TOA estimate. FFT spectrum estimation is the simplest algorithm to estimate
TOA from channel estimates. MUSIC spectrum estimation method is a super-resolution spectrum
estimation algorithm. It requires estimate null space of the covariance matrix of the
channel estimate. Forward-backward averaging and spatial smoothing can used to improve the
rank of the covariance matrix used for MUSIC.
References
[1] Reza Zekavat and R. Michael Buehrer, Handbook of Position Location: Theory, Practice, and Advances, 2019
[2] Andreas F. Molisch. Wireless Communications: From Fundamentals to Beyond 5G, 3rd Edition, 2023
[3] Y. T. Chan and K. C. Ho, "A simple and efficient estimator for hyperbolic location," in IEEE Transactions on Signal Processing, vol. 42, no. 8, pp. 1905-1915, Aug. 1994
[4] P. Stoica and A. Nehorai, "MUSIC, maximum likelihood, and Cramer-Rao bound," in IEEE Transactions on Acoustics, Speech, and Signal Processing, vol. 37, no. 5, pp. 720-741, May 1989
Version History
Introduced in R2024a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)