PX4 uORB Write
Write uORB data for the specified uORB topic
Libraries:
UAV Toolbox Support Package for PX4 Autopilots / PX4 uORB Read and Write Blocks
Description
Add-On Required: This feature requires the UAV Toolbox Support Package for PX4 Autopilots add-on.
The PX4 uORB Write block accepts a Simulink® nonvirtual bus that corresponds to the specified uORB topic and publishes the message to the uORB network.
On each sample hit, the block converts the Msg input from a Simulink bus signal to a uORB message and publishes it. The block does not distinguish
whether the input is a new message; but, merely publishes it on every sample hit.
During Connected I/O simulation, this block writes data to the peripherals of the hardware.
Examples

Getting Started with uORB Blocks for PX4 Autopilots Support Package
Read and write uORB messages using PX4 uORB Read and PX4 uORB Write blocks.
Ports
Input
Parameters
Main Tab
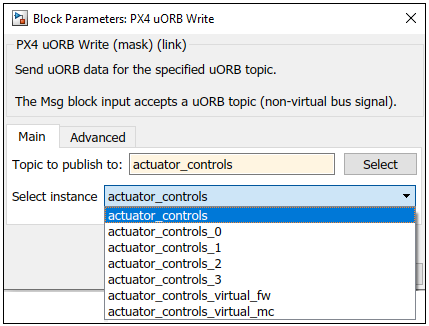
Select the name of the uORB topic that the block needs to publish to. Click
Select to browse topic names available in the
Firmware/msg folder of the px4 directory that
you downloaded.
Select the instance of the uORB topic that the block needs to publish to.
Dependencies
This parameter appears only if you select a topic that supports multiple instances, in the Topic to publish to parameter.
For example, the actuator_controls topic supports multiple
instances and you can select one instance from the drop-down.
Version History
Introduced in R2018b