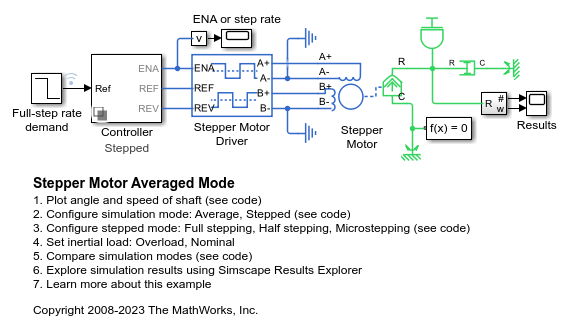
Stepper Motor Averaged Mode
This model shows the Stepper Motor simulating in Stepping and Averaged simulation modes. The purpose of Averaged mode is faster simulation for any loads that do not cause slip. To avoid incorrect interpretation of results, the stepper motor has an approximate detection of slip which can be set to generate a warning or an error.
The nominal inertial load for the stepper motor is 1e-3 kg*m^2. If you increase load inertia (workspace parameter J) to 0.2 kg*m^2 or load damping (workspace parameter L) to 2 N*m/s, both simulation modes will indicate slip for a step rate demand of 50 full steps per second. Once slip occurs, results will diverge as the Averaged mode assumes the stepper speed controller detects slip and adjusts the demand to maintain synchronous operation.
Model
Simulation Results from Simscape Logging
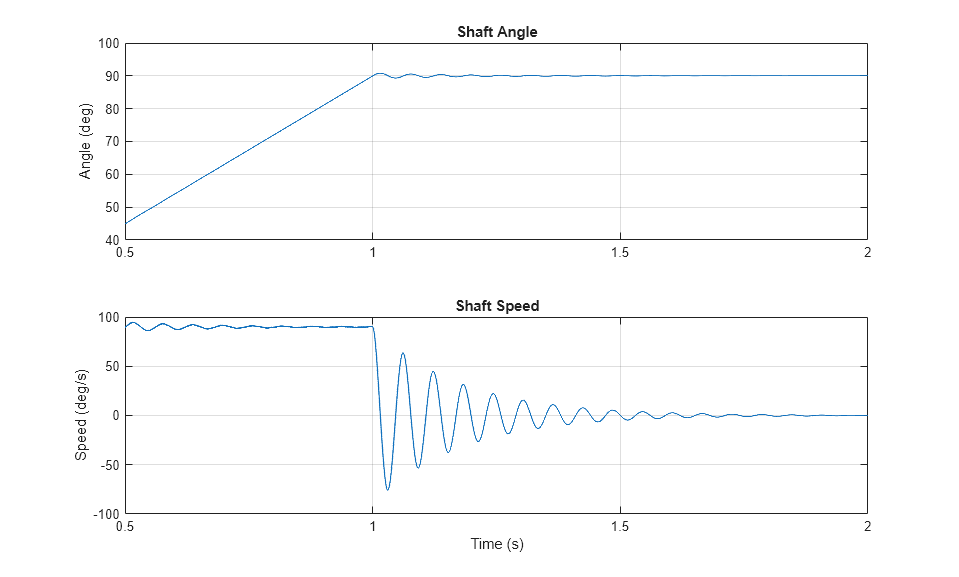
The plot below shows the shaft angle and shaft speed of the stepper motor in full stepping mode. Oscillations in the shaft speed occur as the shaft settles into the current step. In averaged mode, the angle and speed are smooth as individual steps are not simulated.
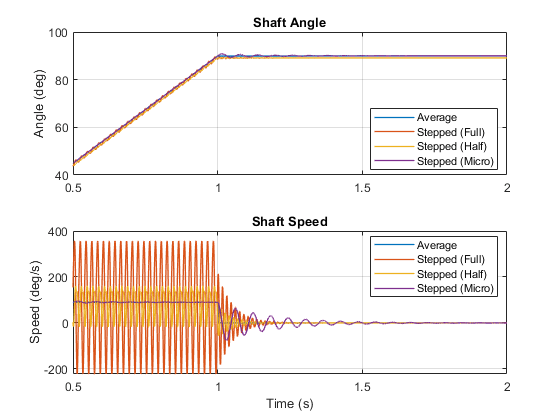
The plot below compares the shaft angle and shaft speed of the stepper motor in averaged and stepped mode. For the stepped mode, the plot compares three stepping methods: Full stepping, Half stepping, and Microstepping.
Full stepping mode selected Half stepping mode selected Microstepping mode selected


You can observe oscillations in the shaft speed in stepped mode, as the individual steps are simulated.
You can observe reduced oscillations with microstepping.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)