Induction Machine Measurement
Per-unit measurement from induction machine

Libraries:
Simscape /
Electrical /
Electromechanical /
Asynchronous
Description
The Induction Machine Measurement block outputs a
per-unit measurement associated with a connected Induction Machine
Squirrel Cage or Induction Machine Wound
Rotor block. The input of the Induction Machine
Measurement block connects to the pu output port
of the induction machine block.
You set the Output parameter to a per-unit measurement associated with the induction machine. Based on the value you select, the Induction Machine Measurement block:
Directly outputs the value of an element in the input signal vector
Calculates the per-unit measurement by using values of elements in the input signal vector in mathematical expressions
The Induction Machine Measurement block outputs a per-unit measurement from the induction machine according to the output value expressions in the table. For example, when you set Output to Stator d-axis voltage, the block directly outputs the value of the pu_vds element in the input signal vector. However, when you set Output to Slip, the block calculates the slip value by subtracting the value of the pu_velocity element from 1.
| Output Parameter Setting | Output Value Expression |
|---|---|
Electrical torque | pu_torque |
Rotor velocity | pu_velocity |
Stator d-axis voltage | pu_vds |
Stator q-axis voltage | pu_vqs |
Stator zero-sequence voltage | pu_v0s |
Stator d-axis current | pu_ids |
Stator q-axis current | pu_iqs |
Stator zero-sequence current | pu_i0s |
Slip | 1-pu_velocity |
Apparent power | |
Real power | pu_Pt = (pu_vds*pu_ids) + (pu_vqs*pu_iqs) + 2(pu_v0s*pu_i0s) |
Reactive power | pu_Qt = (pu_vqs*pu_ids) – (pu_vds*pu_iqs) |
Terminal voltage | |
Terminal current | |
Power factor angle (rad) | power_factor_angle = atan2(pu_Qt, pu_Pt) |
Power factor | cos(power_factor_angle) |
Examples
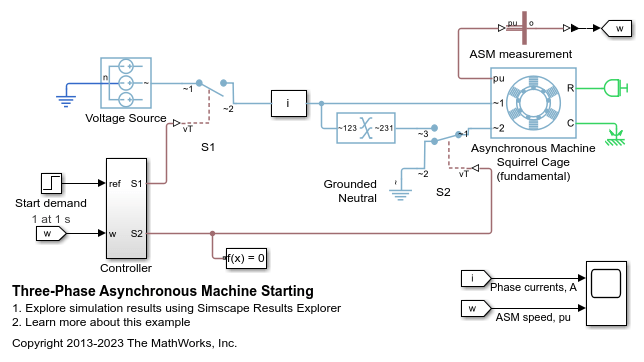
Three-Phase Asynchronous Machine Starting
Model a wye-delta starting circuit for an induction machine. After one second, the Controller subsystem closes the switch labeled S1. Closing this switch connects the supply to the machine. Initially, the machine connects to the supply in a wye configuration because the switch labeled S2 connects each phase of the ~1 port to the corresponding phase of the ~2 port and leaves the ~3 port unconnected. Once the machine is at 80% of the synchronous speed, S2 reconnects the machine in a delta configuration by disconnecting each phase of ~2 and connecting each phase of ~1 to the corresponding phase of ~3. The motor then operates in a delta configuration regardless of rotor speed. The supply sees a higher impedance when the motor is in wye configuration, reducing the starting current and causing less disruption to other connected loads.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2013b
See Also
Simscape Blocks
Simscape Blocks
- Induction Machine Current Controller | Induction Machine Direct Torque Control | Induction Machine Direct Torque Control with Space Vector Modulator | Induction Machine Field-Oriented Control | Induction Machine Flux Observer | Induction Machine Scalar Control | Induction Machine Direct Torque Control (Single-Phase) | Induction Machine Field-Oriented Control (Single-Phase)